автордың кітабын онлайн тегін оқу Соревновательная робототехника. Программирование робота Lego «Перевозчик»
Соревновательная робототехника. Программирование робота Lego «Перевозчик»
Оглавление
- Соревновательная робототехника. Программирование робота Lego «Перевозчик»
- Введение
- I. Описание задания
- II. Базовые алгоритмы
- Анализ задания робота
- Прямолинейное движение робота на заданное расстояние
- Поворот корпуса робота вокруг центра осевой линии ведущих колес
- Движение вдоль черной линии по двум датчикам освещенности
- Настройка и калибровка датчиков
- III. Программирование мобильной платформы
- Выбор и сборка мобильной платформы
- Программирование мобильных функций робота
- IV. Конструктивные особенности робота «Перевозчика»
- Общие положения и требования к роботу
- Проектирование и сборка устройства захвата кубика
- V. Разработка программы
- Построение алгоритма выполнения задания робота «Перевозчика»
- Программирование основных функций робота
- Компоновка основного кода программы
- Заключение
- Список литературы
- Приложение 1. Модель мобильной платформы
- Приложение 2. Модель робота «Перевозчик»
Введение
В этой книге хотелось бы поделиться тем практическим опытом, который удалось накопить во время занятий по робототехнике в детском технопарке Стерлитамакского филиала БашГУ. Авторами в свое время были подготовлены команды, которые принимали участие в соревнованиях по направлению «Hello, Robot» Lego — Перевозчик. Ребята стали победителями на Региональном робототехническом Фестивале Робофест-Стерлитамак Республика Башкортостан и на III Окружном робототехническом Фестивале Робофест-Самара в 2018 г. Именно решению этого задания посвящен материал книги. Надеемся, что полученные знания будут читателю полезны.
I. Описание задания
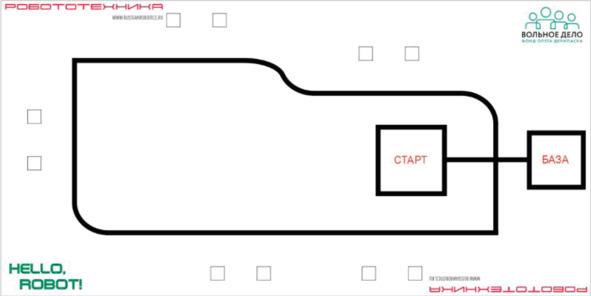
Из условия можно сделать вывод, что решение этого задания не столь очевидно, как кажется на первый взгляд. Поэтому для его решения и ему подобных заданий воспользуемся методом «от простого к сложному». Пока у нас конструкция робота неизвестна, начнем решение задания с простых подзадач. Для их решения будем использовать алгоритмы, которые назовем базовыми.