автордың кітабын онлайн тегін оқу Беспилотники на дорогах России (уголовно-правовые проблемы). Монография
Беспилотники на дорогах России
(уголовно-правовые проблемы)
Монография
Под редакцией
доктора юридических наук, профессора
А. И. Чучаева
Информация о книге
УДК 343.2/.7
ББК 67.408я73
Б53
Авторы:
Воробьев А. И., кандидат технических наук, доцент, заместитель заведующего кафедрой «Организация и безопасность движения» Московского автомобильно-дорожного государственного университета (МАДИ);
Жанказиев С. В., доктор технических наук, профессор, заведующий кафедрой «Организация и безопасность движения» Московского автомобильно-дорожного государственного университета (МАДИ);
Иванов С. А., руководитель подразделения информационной безопасности компании «Первый Бит»;
Коробеев А. И., доктор юридических наук, профессор, заведующий кафедрой уголовного права и криминологии Дальневосточного федерального университета, заслуженный деятель науки РФ;
Маликов С. В., кандидат юридических наук, доцент Московского государственного юридического университета имени О. Е. Кутафина (МГЮА);
Чучаев А. И., доктор юридических наук, профессор Московского государственного юридического университета имени О. Е. Кутафина (МГЮА).
Впервые в российской уголовно-правовой литературе исследуются проблемы ответственности за причинение вреда в результате дорожно-транспортного происшествия с участием высокоавтоматизированного автотранспортного средства. Дана характеристика беспилотника, показаны особенности механизма нарушения безопасности, при этом особое внимание уделено роли информационных угроз в его аварийности (представлена модель угроз безопасности информационной системы «высокоавтоматизированное транспортное средство – дорожная инфраструктура»), рассмотрены общие и специальные вопросы криминализации и пенализации нарушений правил безопасности функционирования робомобилей, показан опыт решения аналогичных вопросов в зарубежных странах.
Законодательство приведено по состоянию на 1 августа 2020 г.
Для специалистов в области уголовного права, а также всех тех, кто интересуется проблемами противодействия аварийности на дорогах средствами уголовного права.
Исследование выполнено при финансовой поддержке РФФИ в рамках научного проекта № 18-29-16162.
УДК 343.2/.7
ББК 67.408
© Коллектив авторов, 2020
© ООО «Проспект», 2020
Перечень сокращений и обозначений
АВЗ – антивирусная защита
АРМ – автоматизированное рабочее место
АС – автоматизированная система
АСВ – автоматизированная система вождения
АСУ – автоматизированная система управления
АУД – аудит безопасности
БДД – безопасность дорожного движения
ВАТС – высоко- или полностью автоматизированное транспортное средство
ГЛОНАСС – глобальная навигационная спутниковая система
ГНСС – глобальные навигационные спутниковые системы
ДИ – дорожная инфраструктура
ДНС – обеспечение действий в нештатных ситуациях
ДТП – дорожно-транспортное происшествие
ДТС – дорожно-транспортная ситуация
ЗИС – защита информационной (автоматизированной) системы и ее компонентов
ЗНИ – защита машинных носителей информации
ЗТС – защита технических средств и систем
ИАФ – идентификация и аутентификация
ИНЦ – реагирование на инциденты информационной безопасности
ИПО – информирование и обучение персонала
ИС – информационная система
ИС «ВАТС — ДИ» – информационная система высоко- или полностью автоматизированное транспортное средство — дорожная инфраструктура
ИСПДн – информационная система персональных данных
ИТС – интеллектуальная транспортная система
КИ – конфиденциальная информация
К-ИТС – кооперативная интеллектуальная транспортная система
НСД – несанкционированный доступ к информации
ОДТ – обеспечение доступности
ОПО — управление обновлениями программного обеспечения
ОЦЛ – обеспечение целостности
ПДн – персональные данные
ПДД – правила дорожного движения
ПЛН – планирование мероприятий по обеспечению безопасности
ПО – программное обеспечение
ПЭМИН – угроза утечки информации по каналам побочных электромагнитных излучений и наводок
СВПД – система высокоточного позиционирования дороги
СВТ – средства вычислительной техники
СЗИ – средство защиты информации
СОВ – предотвращение вторжений (компьютерных атак)
СШЭ – среда штатной эксплуатации
ТП – технологическая платформа
ТП «ВАТС — ДИ» – технологическая платформа высоко- или полностью автоматизированное транспортное средство — дорожная инфраструктура
ТС – транспортное средство
УБИ – угроза безопасности информации
УБПДн – угрозы безопасности персональных данных
УКИТК – угрозы компрометации информации по техническим каналам
УКФ – управление конфигурацией
УПД – управление доступом
ФСТЭК – Федеральная служба по техническому и экспортному контролю
ЧМИ – человеко-машинный интерфейс
ЧП – чрезвычайное происшествие
ЦМД – цифровая модель дороги
ЦОД – центр обработки данных
ADAS – Advanced Driver-Assistance Systems, усовершенствованные системы помощи водителю
OBU – On-Board Unit, бортовое устройство транспортного средства, обеспечивающее поддержку связи с другими OBU или RSU
RSU – Road Side Unit, устройство дорожной инфраструктуры, обеспечивающее поддержку связи с проезжающими транспортными средствами
Введение
С 2015 г. в России активно развиваются технологии, необходимые для создания беспилотных автомобилей. Так, российская компания КамАЗ в рамках программы «Автонет»1 подготовила прототип модели беспилотного автомобиля2. Первый публичный тест-драйв беспилотного КамАЗа состоялся в Набережных Челнах 27 октября 2015 г. Машина самостоятельно выполнила «змейки», развороты и останавливалась перед пешеходами.
Среди российских автомобилестроителей разработкой беспилотного транспортного средства занимается и Горьковский автомобильный завод (ГАЗ). В 2010 г. компания начала участвовать в программе «Робототехника», а с 2018 г. приступила к тестированию в условиях городского движения автобуса ГАЗель NEXT3.
22 июня 2018 г. беспилотный автомобиль «Яндекса» совершил первую большую поездку из Москвы в Казань. Преодолев 780 км, машина в пути находилась 11 часов (в дневное и ночное время), при этом 99% времени двигалась в автоматическом режиме, соблюдая все скоростные ограничения.
В 2018 г. в «Сколково» запустили опытную зону для поездок на беспилотном общественном транспорте. Условия управления им приближены к тем, что есть на дорогах общего использования. Специалисты полагают, что первыми на улицах Москвы появятся беспилотные автобусы, а потом — такси. Это, скорее всего, будет смартбас, разработанный одной из российских компаний4.
Будущее автономных автомобилей в России зависит от ряда факторов, в том числе от развития дорожной сети, ее адаптации к «умным автомобилям», особенно в регионах. Если для таких транспортных средств не подготовить соответствующие дороги, то спроса на них, как считают специалисты, не будет5. В связи с этим в Стратегии развития автомобильной промышленности Российской Федерации на период до 2025 г., утвержденной распоряжением Правительства РФ от 28 апреля 2018 г. № 831-р6, подчеркивается, что «особую значимость для успешного развития беспилотного (автономного) транспорта приобретет усовершенствование и создание новой дорожной и информационно-телекоммуникационной инфраструктуры, обеспечивающих беспилотные (автономные, самоуправляемые) транспортные средства необходимыми сервисами и информацией».
На автомобильных дорогах общего пользования существует сложная динамическая система, включающая в себя совокупность элементов, функционирующих в определенной среде — человек, транспортное средство, дорога. Эти элементы единой дорожно-транспортной системы находятся в определенных отношениях и связях друг с другом, они формируют факторы риска, которые могут привести к дорожно-транспортному происшествию (ДТП). Высоко- и полностью автоматизированные транспортные средства (ВАТС), функционирующие в беспилотном режиме (БПТС), должны поэтапно включаться в уже сложившуюся транспортную систему, не подвергая опасности других участников дорожного движения и обеспечивая полное соблюдение установленных правил дорожного движения.
ВАТС появляются и развиваются не отдельно, а как закономерный этап развития технологий интеллектуальных транспортных систем (ИТС) (рис. 1). Беспилотные транспортные средства опираются на базовые технологии, включающие в себя элементы ИТС, которые уже используются на дороге. В дальнейшем при внедрении ВАТС отдельные компоненты этих ИТС трансформируются в цифровую модель дороги (ЦМД). Психофизиология, которая была при ручном управлении, также развивается и трансформируется. Надо отметить, что чем более система автоматизирована, тем больше знаний о психофизиологии участников дорожного движения необходимо знать. Вопросы транспортного планирования и имитационного моделирования также преобразуются при внедрении ВАТС.

Рис. 1. Стратегия развития автономных транспортных систем
Принципиальные подходы к обеспечению безопасного взаимодействия БПТС с другими участниками дорожного движения включают ключевые компоненты:
— безопасность через обеспечение ситуационной осведомленности БПТС путем максимального использования возможностей дорожно-транспортной инфраструктуры и всестороннего риск-менеджмента;
— безопасность через последовательное наращивание возможностей БПТС с учетом результатов, полученных при их опытной эксплуатации.
Первый компонент подразумевает многообразие и избыточность компонентов обеспечения безопасности транспортного средства, что позволяет минимизировать возможные риски за счет одновременного использования возможностей различных подходов и технологий, в том числе реализации преимуществ сетевого взаимодействия между транспортным средством и его окружением в формате V2X. Организация сетевого взаимодействия V2X является важным средством увеличения объема и качества информации, получаемой транспортным средством, повышения его ситуационной осведомленности, что особенно важно для обеспечения безопасности беспилотного движения в транспортном потоке.
Второй компонент предполагает постоянное совершенствование конструкции ВАТС и критически важных для его работы компонентов, поэтапное повышение его функциональных возможностей с целью обеспечения безопасного взаимодействия с участниками дорожного движения на всех уровнях автоматизации. Переоценка водителем возможностей систем частичной и условной автоматизации уже явилась причиной нескольких ДТП со смертельным исходом. Снижая вовлеченность водителя в процесс управления, системы автоматизации провоцируют его переключить внимание на другие действия (чтение, просмотр различного контента, общение с пассажирами или по телефону, сон и т. д.). Необходимо обеспечить либо постоянную вовлеченность водителя, либо полностью освободить его от задач управления, что может быть достигнуто уже в настоящее время при поддержке дорожной инфраструктуры.
Безопасному движению транспортного потока, в котором имеются ВАТС, движущиеся в беспилотном режиме, должны способствовать следующие принципы организации дорожного движения:
— разделение потоков в пространстве;
— разделение потоков во времени;
— оптимизация скоростного режима;
— формирование однородных потоков;
— организация безопасного движения пешеходов и иных уязвимых участников дорожного движения;
— оптимизация использования парковочного пространства;
— внедрение интеллектуальных транспортных систем.
Развитие технологий подключения автомобиля к дорожно-транспортной инфраструктуре должно быть нацелено на реализацию следующих принципов безопасности:
— значительное снижение вероятности ДТП;
— обеспечение конфиденциальности персональных данных водителей и пользователей;
— обеспечение защиты от кибератак;
— обеспечение защиты от вероятных террористических атак, предпринимаемых с использованием ВАТС;
— обеспечение защиты от намеренной дестабилизации дорожного движения посредством использования ВАТС.
Автомобили имеют широкий диапазон потенциальных уязвимостей, поэтому решения по обеспечению безопасности должны быть многоуровневыми, чтобы обеспечить оптимальную защиту, а перечисленные принципы безопасности должны учитываться еще на этапе разработки транспортного средства и быть неотъемлемой частью его жизненного цикла.
Реализация принципов обеспечения безопасности движения с участием беспилотных транспортных средств на автомобильных дорогах общего пользования позволит добиться максимальной эффективности функционирования автотранспортного и дорожного комплекса, повысить качество и доступность транспортных услуг для всестороннего удовлетворения потребностей населения и экономики страны.
Однако надо иметь в виду, что с появлением беспилотников появились и новые угрозы общественной безопасности. В связи с этим в работе не только дана характеристика робоавтомобиля, но и показаны особенности механизма дорожно-транспортного происшествия с его участием, роли информационной системы в этом. Особое внимание уделено проблемам криминализации и пенализации нарушения правил безопасного функционирования высокоавтоматизированных транспортных средств.
Авторы благодарят Дмитрия Юрьевича Морозова и Татьяну Викторовну Воробьеву за оказанную помощь при подготовке работы.
[4] См.: Кулябко Л. Это не шутки — беспилотные маршрутки // Московский комсомолец. 2018. 30 авг.
[3] См.: Феклистов И. Автопилот на главной дороге // Комсомольская правда. 2018. 24 июля.
[2] Презентация беспилотного автобуса КамАЗ-1221 ШАТЛ (широкая адаптивная транспортная логистика), разработанного НАМИ и КамАЗ, состоялась 12 июня 2018 г. в Казани. Снабженный искусственным интеллектом электромобиль способен развивать скорость до 110 км/ч.
[1] Программа роботизации транспорта «Автонет» предусматривает направления развития роботизированных автомобилей. Входит в Национальную технологическую инициативу, финансируемую Правительством РФ. В России создана дорожная карта развития российского рынка беспилотных перевозок. Безусловным лидером среди проектов «Автонет» называют проект беспилотного грузовика КамАЗ и ВИСТ Групп.
[6] СЗ РФ. 2018. № 19. Ст. 2804.
[5] См.: Шадрина Т. Без руля, но с головой // РГ. 2018. 22 мая.
Глава I.
ВЫСОКОАВТОМАТИЗИРОВАННОЕ ТРАНСПОРТНОЕ СРЕДСТВО
(БЕСПИЛОТНИК)
§ 1. Понятие, уровни автономности и конструктивные особенности автомобилей с высокой степенью автоматизации
Внедрение беспилотных транспортных средств подразумевает четкое и последовательное определение ключевых терминов, их дальнейшее корректное использование, в том числе в нормативных правовых документах и актах технического регулирования, так как это необходимо для безопасного развертывания систем беспилотного вождения транспортных средств.
Для описания различных форм автоматизации наземного транспорта производители, правительственные органы и ученые ряда стран в настоящее время используют разнообразные термины (в скобках приведены их англоязычные эквиваленты):
1) автономный (autonomous) автомобиль;
2) высокоавтоматизированное транспортное средство (highly automated vehicle);
3) беспилотный автомобиль (driverless car);
4) беспилотное транспортное средство (unmanned vehicle);
5) полностью автоматизированное транспортное средство (fully automated vehicle);
6) роботизированный автомобиль (robotic car);
7) самоуправляемое транспортное средство (self-driving vehicle).
Ни один из этих терминов не является общепризнанным и нормативно закрепленным на международном уровне, так же как, в зависимости от контекста, — однозначно правильным или неправильным. Тем не менее наметилось общее понимание в вопросе разработки профильной терминологии в среде профессионалов на уровне международных организаций.
В Российской Федерации в нормативных правовых актах используется термин «высокоавтоматизированное транспортное средство» под которым понимается транспортное средство, в конструкцию которого внесены изменения, связанные с его оснащением автоматизированной системой вождения. В свою очередь, автоматизированная система вождения рассматривается как программно-аппаратные средства, осуществляющие управление транспортным средством без физического воздействия со стороны водителя, с возможностью автоматического отключения при воздействии водителя на органы управления для перехода в режим ручного управления при необходимости, в том числе для предотвращения дорожно-транспортного происшествия7.
Устанавливается 5 уровней автоматизации ВАТС, которым задаются соответствующие СШЭ:
— уровень 0 — человек осуществляет полное управление ТС;
— уровень 1 — система помощи водителю (ADAS), позволяющая помогать водителю либо управлять рулем, либо тормозить/ускоряться, но не одновременно;
— уровень 2 — ADAS, позволяющая сама одновременно воздействовать как на рулевое управление, так и на торможение/ускорение, но водитель-человек всегда должен уделять внимание и контролировать обстановку движения, выполняя остальную часть управления ТС;
— уровень 3 — автоматизированная система вождения (АСВ), позволяющая выполнять все задачи вождения ТС при определенных обстоятельствах, однако человек всегда должен быть готов вернуть управление под свой контроль;
— уровень 4 — АСВ сама может выполнять все задачи вождения ТС и контролировать условия вождения, но человеку необходимо осуществлять наблюдение и контроль за работой системы;
— уровень 5 — АСВ на ТС обеспечивает полное управление автомобилем при любых обстоятельствах без участия человека.
Транспортные средства с высокой степенью автоматизации отличаются от неавтоматизированных как с точки зрения программного обеспечения, так и с технической стороны. Для того чтобы движение такого типа транспортных средств было возможно в автоматизированном режиме, разработчики и производители устанавливают на них дополнительное оборудование, как правило, включающее в себя:
— камеры;
— радары;
— лидары;
— инерциальный блок;
— система высокоточной навигации.
Камеры. Видеоизображения предоставляют визуальную информацию для водителя, что также может быть использовано в качестве входного параметра при высокоавтоматизированном вождении. Задние и 360° камеры помогают водителю лучше представлять окружающую среду вне автомобиля. Сегодня двумерные камеры широко доступны для отображения изображений и иногда накладывают на дисплей дополнительную информацию, такую как угол поворота рулевого колеса. Автопроизводители уже начинают устанавливать камеры с виртуальными трехмерными изображениями.
Для обеспечения реалистичности трехмерного изображения обычно требуются входные сигналы от четырех до шести камер, при этом необходимо обеспечить «сшивку изображений», чтобы избежать потери информации или генерации побочных изображений. Для двумерных и трехмерных камер требуются датчики изображения с очень высоким динамическим диапазоном, превышающим 130 дБ. Последний необходим для получения четкого изображения даже при попадании прямых солнечных лучей на объектив.
Современные автомобильные тыловые и 360° видеосистемы обычно имеют централизованную архитектуру. Это означает, что центральный блок управления обрабатывает данные от четырех до шести камер. Обработка выполняется программно, поэтому к процессору предъявляются жесткие технические требования. Современные методы сжатия данных также предполагают большие объемы памяти.
Существует еще один подход, который основан на распределении обработки изображений на камеры и последующем распространении данных через Ethernet на головное устройство (ECU, содержащее элемент управления для основного дисплея), завершающее агрегацию и представление изображений. Отдельные изображения предварительно обрабатываются внутри камеры, а затем отправляются на главный процессор головного устройства с использованием сжатия H.264 с малой задержкой через интерфейс Ethernet.
Передние камеры. Они представляют собой системы для средних и высоких диапазонов, например, в диапазоне от 90 до 250 метров. Эти камеры используют алгоритмы для автоматического обнаружения объектов, их классификации и определения расстояния до них. Так, камеры могут идентифицировать пешеходов и велосипедистов, автомобили, боковые полосы, опоры мостов и окраины дорог. Алгоритмы также применяются для обнаружения дорожных знаков и сигналов.
Камеры среднего радиуса действия предупреждают водителя о перекрестном движении, пешеходах, экстренном торможении впереди идущего автомобиля, а также обнаружении полосы и светофора. Камеры дальнего радиуса действия используются для распознавания дорожных знаков, определения расстояния до объектов на основе видео и навигации по дороге. Для этих систем камер не указывается точная цветопередача сигнала, поскольку используются только прямые исходные данные датчика изображения.
Основное различие между камерами для среднего и высокого диапазона — угол раскрытия линз. Для систем среднего радиуса действия используется горизонтальное поле зрения от 70° до 120°, тогда как камеры с широким диапазоном апертур используют горизонтальные углы приблизительно 35°.
Будущие системы будут пытаться охватить средние и высокие диапазоны исключительно оптической системой. Чтобы добиться успеха, датчики изображения, вероятно, должны иметь более 7 миллионов пикселей.
Радар. Статистика показывает, что 76% дорожно-транспортных происшествий основано исключительно на человеческой ошибке. ADAS (адаптивные системы помощи водителю) требуют нескольких радарных датчиков, которые вносят решающий вклад в общую функцию автономного вождения. Радар (radio detection and ranging) обеспечивает радиообнаружение и измерение дальности.
Современные радиолокационные системы работают на частоте 24 ГГц или 77 ГГц, а также в более точном угловом разрешении. Другими их преимуществами являются меньший размер антенны, а также работа с меньшими помехами. Основные различия лежат между приложениями SRR (радар ближнего радиуса действия) и приложениями MRR / LRR (радар ближнего радиуса действия, радар большой дальности).
Радары ближнего действия выполняют следующие функции:
— мониторинг слепых зон;
— поддержание полосы движения и помощник смены полосы движения;
— задний радиолокатор для предупреждения о столкновении или предотвращения столкновения;
— помощь при парковке.
В качестве примеров приложений MRR / LRR можно назвать:
— тормозной ассистент;
— экстренное торможение;
— автоматический контроль расстояния.
Приложения SSR в основном предназначены для замены ультразвуковых датчиков и поддержки высокоавтоматизированного вождения. С этой целью датчики размещены в каждом углу транспортного средства, а еще один датчик для дальнего обнаружения расположен на передней его части. Для радиолокационной системы «кокон» дополнительные датчики размещены на каждой боковой части автомобиля.
В идеале эти радарные датчики должны использовать полосу частот 79 ГГц с шириной полосы 4 ГГц, однако глобальные спецификации частоты до сих пор допускают ширину полосы только 1 ГГц на частоте 77 ГГц. Общим разделением для радара MMIC (монолитная микроволновая интегральная схема) являются три канала передачи (TX) и четыре канала приема (RX) для монолитной интеграции. Специалистами обсуждается вопрос о том, имеет ли смысл интегрировать обработку базовой полосы в MMIC или лучше сосредоточиться на радиолокационном датчике необработанных данных.
Лидар (Light Detection And Ranging) обеспечивает обнаружение, идентификацию и определение дальности с помощью света. Другими словами, он реализует технологии получения и обработки информации об удаленных объектах с помощью активных оптических систем, использующих явления поглощения и рассеяния света в оптически прозрачных средах. Помимо передатчика (лазера), системе требуется высокочувствительный приемник. Применимая для измерения расстояний до стационарных, а также движущихся объектов, система применяет специальные процедуры для предоставления трехмерных изображений обнаруженных объектов. Задача системы помощи водителю заключается в том, чтобы она работала при всех возможных условиях окружающей среды (температура, солнечная радиация, темнота, дождь, снег) и, прежде всего, распознавала объекты на расстоянии до 270 метров. При этом очень важно, чтобы была возможность организации крупносерийного производства при минимально возможных затратах и наименьших габаритах.
Лидарные системы не новы и уже много лет используются в промышленности и армии. Будучи сложными механическими зеркальными системами с круговой обзорностью 360°, они захватывают пространственные изображения объектов. Однако при стоимости в несколько десятков тысяч долларов не подходят для крупномасштабного использования в автомобильном секторе.
На автомобильном рынке существуют две основные тенденции будущего: инфракрасные системы лидар, в которых с помощью микроэлектромеханической системы (MEMS) используется вращающийся лазер или твердотельный лидар.
Камеры, радары и лидары применяются при создании и эксплуатации высокоавтоматизированных транспортных средств. Некоторые производители не используют лидары, аргументируя это тем, что для движения им достаточно лишь данных с радаров и камер.
Инерциальный блок. Инерциальная единица измерения (IMU) — это электронное устройство, которое измеряет и сообщает определенную силу, угловую скорость, а иногда и ориентацию тела на основе комбинации акселерометров, гироскопов, а порой и магнитометров. IMU, как правило, используются для маневрирования воздушных судов (системы ориентации и направления), в том числе беспилотных летательных аппаратов и многих других космических аппаратов, включая спутники. Последние разработки позволяют производить GPS-устройства с поддержкой IMU. IMU позволяет приемнику GPS работать, когда GPS-сигналы недоступны, например, в туннелях, внутри зданий или при наличии электронных помех. В последнее время инерциальные системы широко используются при внедрении высокоавтоматизированных транспортных средств. Главная их функция — снижение возможных погрешностей при отказе основной системы в местах, где сигнал ограничен или отсутствует.
Высокоточная навигация (GNSS) — это глобальные навигационные спутниковые системы (Global Navigation Satellite System). Они применяются для создания координатно-временного поля на поверхности Земли и в околоземном пространстве. Благодаря глобальным навигационным спутниковым системам можно определить местоположение в любой точке. Достоинства подобных систем очевидны: не требуется прямая видимость между пунктами, погрешность в измерениях может считаться минимальной, измерения можно проводить в любое время суток и при любой погоде. Также стоит отметить, что использование GNSS позволяет в значительной степени сократить время, необходимое для определения местоположения точки.
Глобальные навигационные спутниковые системы включают в себя: космические аппараты, наземные системы контроля и управления, навигационные приборы непосредственных пользователей.
Сигналы GNSS без поправок обеспечивают точность позиционирования от пяти до десяти метров. Поправки могут быть сгенерированы несколькими источниками или методами, учитываются в комбинации с многочастотными измерениями из GNSS, чтобы обеспечить точность от нескольких миллиметров до сантиметра, в зависимости от источника поправок.
Для более корректной работы системы также используется RTK (Real time kinematic) — кинематика реального времени. Это совокупность приемов и методов получения плановых координат и высот точек местности сантиметровой точности с помощью спутниковой системы навигации посредством получения поправок с базовой станции, принимаемых аппаратурой пользователя во время съемки.
RTK отправляет данные от эталонных приемников, находящихся в непосредственной близости от автомобиля. Местоположение может быть покрыто одной или несколькими сетями RTK.
PPP (Precise Point Positioning — позиционирование высокой точности) — метод получения высокоточных координат (в плане и по высоте) местности сантиметровой точности с помощью глобальных навигационных спутниковых систем (GNSS) посредством получения поправок.
Такие компоненты, как радар, лидар и камеры, используются для определения расстояния до объектов, окружающих автомобиль. Если точное местоположение последних известно, эта технология способна определить местоположение транспортного средства с помощью большого количества картографических данных. В сочетании с такими дополнительными технологиями, как ультразвуковое, внутреннее движение, цифровые карты, радар/лидар и камеры, GNSS обеспечивает эффективность позиционирования, необходимую для автономных транспортных средств.
§ 2. Инфраструктура управления автомобилем.
Цифровая модель дороги
Одним из наиболее эффективных способов решения транспортных проблем, вызванных влиянием человеческого фактора, является широкое внедрение технологий автономного вождения и создание требований к инфраструктуре с высокой степенью автоматизации управления. В настоящий момент практически все крупные автопроизводители реализуют проекты, направленные на создание частично или полностью автономных транспортных средств, а уже в 2020 г. западные аналитики прогнозируют запуск серийного производства автомобилей с высокой степенью автоматизации управления.
Структура автоматизированного движения (см. рис. 2) состоит из двух основных блоков. Первый блок отвечает за внешнее техническое зрение, необходимое для реализации движения самого ВАТС, и внутреннее — отвечающее за контроль в салоне ВАТС. Второй блок относится к дорожной инфраструктуре и включает в себя К-ИТС и ЦМД.

Рис. 2. Структура автоматизированного движения
Дорожно-транспортная инфраструктура должна быть способна обеспечить максимальную ситуационную осведомленность ВАТС (см. рис. 3). Принятие окончательных решений в различных ВАТС в общем случае осуществляется автоматизированной системой вождения (АСВ) самостоятельно с учетом рекомендаций дорожной инфраструктуры. Право самостоятельного принятия решения АСВ может быть ограничено в установленном законом случае при наличии соответствующей технической возможности со стороны интеллектуальной транспортной системы.

Рис. 3. Физическая и функциональная структура дорожного движения
с участием беспилотных транспортных средств
на автомобильных дорогах общего пользования
Транспортная инфраструктура является составной частью транспортных систем и включает в себя пути сообщения, терминальные объекты, а также вспомогательные средства и системы (энергоснабжения, связи, управления движением, обмена данными и т. д.). Она выступает единой основой функционирования транспортных систем.
В настоящее время транспортная отрасль находится на этапе создания и внедрения транспортных средств с высокой степенью автоматизации. Одним из важных направлений развития беспилотников является обеспечение взаимодействия между различными вовлеченными объектами для обмена информацией через различные протоколы связи, такие как IEEE 802.11p и LTE-V2V.
Современные автомобили частично уже являются участниками автоматизированного управления. Однако в самое ближайшее время они также будут напрямую взаимодействовать как друг с другом, так и с инфраструктурой. Это взаимодействие охватывается областью кооперативных интеллектуальных транспортных систем (C-ITS), которые позволят участникам дорожного движения и транспортным службам использовать ранее недоступную информацию, обмениваться ею и координировать свои действия. Ожидается, что этот тип сотрудничества8 объектов дорожно-транспортного комплекса, обеспечиваемый цифровой связью, значительно улучшит безопасность дорожного движения, эффективность движения и комфорт вождения, помогая водителю принимать правильные решения и адаптироваться к дорожной ситуации.
Связь между транспортными средствами, инфраструктурой и другими участниками дорожного движения также имеет решающее значение для повышения безопасности автоматизированных транспортных средств и их полной интеграции в общую транспортную систему. Сотрудничество, связь и автоматизация — это не только взаимодополняющие технологии, они усиливают действия друг друга и со временем полностью сливаются воедино.
Страны по всему миру (например, США, Австралия, Япония, Корея и Китай) стремительно движутся к внедрению цифровых технологий, а в некоторых транспортные средства и услуги C-ITS уже доступны на рынке. Министры транспорта G79 неоднократно подчеркивали необходимость таких действий. Несколько государств начали развертывание C-ITS в реальных условиях через стратегические альянсы, такие как, например, кооперативный коридор10 ЕС.
Объединение транспортных средств и инфраструктуры через кооперативный коридор приближает к концепции интеллектуальной и безаварийной мобильности населения. Технически это достигается с помощью кооперативных систем. Они обеспечивают прямую связь между транспортными средствами, системами контроля дорожного движения и центрами управления движением. В этом случае используется связь V2X (связь между транспортным средством и другими объектами ИТС) или C-ITS (кооперативные интеллектуальные транспортные системы).
Существует два основных этапа развития кооперативных ИТС:
— создание кооперативных ИТС, обеспечивающих сетевое взаимодействие управляемых водителем транспортных средств с дорожной инфраструктурой;
— создание кооперативных ИТС, обеспечивающих сетевое взаимодействие транспортных средств с высокой степенью автоматизации управления с дорожной инфраструктурой.
Для успешного развертывания C-ITS требуется беспрецедентный уровень сотрудничества во многих секторах. Чтобы избежать возможных последствий отката назад, таких как увеличение трафика и выбросов, необходимо тесное сотрудничество межминистерского и муниципального уровней управления транспортом и цифровыми коммуникациями. Например, интегрировать совместные, подключенные и автоматизированные транспортные средства в планирование устойчивой мобильности или концепцию «Мобильность как услуга», включая общественный транспорт и активные способы передвижения, такие как ходьба и езда на велосипеде. Для обеспечения широкого признания технологий C-ITS и максимизации их экономического и социального воздействия участие граждан является ключевым фактором, и развертывание C-ITS должно быть сосредоточено на пользователе.
Цифровая транспортная система требует мышления как в горизонтальных срезах, пересекающих различные виды транспорта и отрасли, так и в вертикальных (таких как срез «транспорт – энергетика – телекоммуникации»). Больше нельзя фокусироваться только лишь на одном слое инфраструктуры (например, на дорогах или транспортных средствах). Цифровые технологии также основаны на слое данных, который содержит как статические данные, такие как цифровые карты или правила дорожного движения, так и динамические данные, такие как информация о трафике в реальном времени. Эти данные затем используются для разработки слоя инновационных услуг и приложений, которые доступны через слой сетей. Чтобы наилучшим образом использовать цифровые технологии, необходимо обеспечить доступ к рынкам и добросовестную конкуренцию на каждом из этих уровней.
Для создания благоприятных условий для развертывания услуг C-ITS необходимо обеспечить непрерывность обслуживания, т. е. доступность услуг для конечных пользователей, так как это является наиболее важным фактором для быстрого развертывания C-ITS. С самого начала развертываемые сервисы должны быть максимально доступными как для объектов инфраструктуры, так и транспортных средств. Поэтому необходимо устанавливать приоритеты для скоординированного развертывания услуг C-ITS государством и отраслью.
Перечень используемых сервисов с точки зрения приоритетности рациональнее разделить на несколько групп.
Первая группа — это технологически подготовленные и полезные услуги, чтобы конечные пользователи и общество в целом могли воспользоваться ими как можно скорее. Например, предупреждение о дорожных работах; информация о погодных условиях; аварийный стоп-сигнал и другие опасности.
Вторая группа — это услуги, для которых полные спецификации или стандарты на данный момент могут быть готовы к крупномасштабному развертыванию только частично. Например, все сервисы, относящиеся к ВАТС.
Разработка единого решения безопасности для развертывания и эксплуатации C-ITS, в свою очередь, должна заложить основу повышения безопасности на более высоких уровнях автоматизации (включая передачу данных между транспортными средствами и инфраструктурой).
Сообщения C-ITS будут передаваться для широкого спектра услуг, в различных транспортных ситуациях и между различными участниками. Как правило, водителям все равно, какие коммуникационные технологии используются для передачи сообщений C-ITS, они ожидают беспрепятственного получения всей информации о состоянии трафика и безопасности по всей стране или на межнациональном уровне. Это может быть достигнуто только с помощью гибридного коммуникационного подхода, т. е. путем объединения различных коммуникационных технологий.
Чтобы поддерживать все услуги C-ITS для транспортного средства, на борту должен быть полный гибридный набор связи.
Требования к инфраструктуре при выборе коммуникационных технологий зависит:
— от ее местоположения;
— типа услуг;
— экономической эффективности.
В отличие от модели связи V2V, которая обеспечивает обмен информацией только между транспортными средствами, V2I позволяет транспортным средствам в пути взаимодействовать с транспортной инфраструктурой. Эти компоненты включают в себя RFID-считыватели, дорожные светофоры, дорожные камеры, станции ИТС, уличные фонари, метеостанции и парковочные счетчики.
Как правило, связь V2I является беспроводной, двунаправленной и, аналогично V2V, использует для передачи данных выделенные частоты связи ближнего действия (DSRC) и сотовую технологию. Информация отправляется элементами инфраструктуры к транспортному средству или, наоборот, через специальную сеть. Поэтому выбор местоположения элементов инфраструктуры особенно важен для точности информации и качества ее передачи через средства связи.
В странах Европейского союза в настоящее время наиболее перспективным гибридным коммуникационным соединением является комбинация ETSI ITS-G5 и существующих сетей сотовой связи. Это обеспечивает наилучшую возможную поддержку для развертывания всех услуг C-ITS в рамках первой группы. Данный способ сочетает в себе низкую задержку ETSI ITS-G5 для критичных ко времени сообщений C-ITS, связанных с безопасностью, с широким географическим охватом и доступом к большим группам пользователей существующих сетей сотовой связи.
В оборудование V2I могут поступать инфраструктурные данные и передавать водителям сообщения в реальном времени, отправляя информацию о дорожных условиях, транспортных заторах на дорогах, любых дорожно-транспортных происшествиях на проезжей части, технических авариях, наличии ремонтных работ, наличии парковочных мест и др. Кроме того, службы организации дорожного движения и верхний уровень управления ИТС могут использовать данные, собранные от инфраструктуры и транспортных средств, чтобы установить переменные ограничения скорости и отрегулировать длительность светофорного цикла и фаз для обеспечения экономии топлива и оптимизации параметров движения транспортных потоков.
Аппаратное и программное обеспечение связи между транспортными средствами и инфраструктурой являются фундаментальной отправной точкой для развития автономных транспортных средств.
Одной из основных задач совершенствования интеллектуальной дорожной инфраструктуры является совершенствование технологической инфраструктуры, которая должна включать в себя полноценную работу всех типов связи V2X и C-V2X. Другой важной задачей является создание верхнего уровня управления интеллектуальной дорожной инфраструктурой, которым является цифровая модель дороги (ЦМД).
Формирование подходов по созданию технологии обеспечения движения беспилотного автотранспорта на основе системы высокоточного позиционирования и цифровой модели дороги. Решение задачи обеспечения движения смешанных транспортных потоков в автоматизированном режиме необходимо реализовывать на основе технологии ЦМД и специальных алгоритмов управления автоматизированными транспортными потоками. Суть технологии заключается в подготовке и передаче от ЦМД на бортовые системы автомобиля стратегической информации, необходимой для эффективного и безопасного управления транспортными потоками, и формировании на ее основе управляющих воздействий АСВ транспортного средства.
Задачи безопасного движения, исключения столкновений автоматизированного транспортного средства с другими участниками движения и иными препятствиями вполне могут быть решены с использованием средств технического зрения, однако наличие дополнительных сведений, получаемых от единой информационной системы о различных событиях, например, о дорожно-транспортном происшествии, гололедице, ремонте дороги и др., позволят вывести показатели безопасности дорожного движения на качественно новый уровень. Прежде всего, данное положение обусловлено тем, что ЦМД предоставляет ту или иную информацию заблаговременно. Это позволяет увеличить временной интервал, в течение которого системам автономного движения необходимо предпринять соответствующие ситуации действия, обусловит снижение или вовсе исключит необходимость применения экстренных мер и резкого маневрирования. Кроме того, применение ЦМД даст возможность реализовать автономное движение в неблагоприятных погодных условиях, ночью, без оснащения дорожной инфраструктуры дорогостоящим оборудованием, а также минимизировать эксплуатационные расходы на содержание системы.
Методология формирования цифровой модели дороги. ЦМД должна создаваться как информационная модель с распределенным хранением данных, предоставляемых для использования в различных режимах эксплуатации: онлайн и офлайн. Режим онлайн подразумевает использование ЦМД в виде геолокационных сервисов, а режим офлайн предназначен для автономного использования ЦМД в составе автомобильных навигаторов и устройств автоматического управления. Также возможен и комбинированный подход, где при нахождении в зоне устойчивой связи в режиме онлайн происходит получение данных ЦМД на определенную территорию или маршрут движения транспортного средства с целью последующего задействования автоматизированных систем управления.
Таким образом, ЦМД должна обеспечивать:
— ситуационную осведомленность автоматизированного транспортного средства;
— определение оптимальных маршрутов движения автоматизированного транспортного средства и их безопасного скоростного режима.
Состав ЦМД включает в себя следующие компоненты:
— цифровую крупномасштабную навигационную карту с описанием структурных линий дорог, дорожной разметки, осевых линий полос движения;
— актуальный план организации дорожного движения;
— цифровой граф дорог;
— цифровые сведения об условиях движения, характеризующие текущую дорожно-транспортную обстановку (препятствия, ДТП, погодные условия, качество дорожного покрытия и пр.);
— данные, описывающие объекты придорожной инфраструктуры и сервиса;
— программные интерфейсы формирования оптимальных маршрутов движения и скоростных режимов движения автоматизированного транспортного средств;
— программные интерфейсы формирования линии движения для каждого автоматизированного транспортного средства с учетом их кинематических моделей, с пополосной детализацией и с учетом вариативности движения по полосам;
— программные интерфейсы предоставления сведений об участке дороги для специального вычислителя, обеспечивающего управление движением автоматизированного транспортного средства с применением устройств технического зрения.
Общий состав пространственных данных ЦМД охватывает следующие слои:
— фоновые данные. Данный слой создается на основе цифровых планов городов и представляет собой цифровую картографическую подложку;
— дорога. Данный слой создается на основе детальной съемки дорожных полотна, разметки, знаков и светофоров с использованием средств высокоточного позиционирования.
Цифровая съемка дороги может быть проведена с помощью высокопроизводительной специализированной дорожной лаборатории по технологии мобильного лазерного сканирования (см. рис. 4).

Рис. 4. Специализированная дорожная лаборатория
(на примере НПО Регион)
На первом этапе подвижная лаборатория, двигаясь по дороге, получает и регистрирует следующие данные:
— цифровое видеоизображение (несколько синхронизированных каналов), как покадровое, так и потоковое с высоким разрешением;
— пройденный путь;
— геометрию дороги, включая радиусы кривых и углы поворота в плане, продольные и поперечные уклоны, радиусы выпуклых и вогнутых кривых;
— географические координаты объектов в системе координат WGS-84 с высокой точностью.
На втором этапе осуществляется обработка полученных данных с помощью специализированного программного обеспечения (см. рис. 5) и получают следующие данные:
1) визуальную идентификацию дорожных объектов;
2) измерение геометрических размеров любых дорожных объектов: точечных (дорожные знаки, рекламные щиты, опоры, сигнальные столбики); линейных (трещины, дорожная разметка, ограждения, лесополосы); плоскостных (выбоины, ямочный ремонт, проезжая часть, обочины, пешеходные дорожки).

Рис. 5. Специализированное ПО обработки информации
Полученные данные хранятся в векторном виде и визуализируются как условные обозначения, соответствующие нормативно-технической документации. Данные слоя «дорога» могут быть опубликованы с применением таких протоколов, как OGS WMS и WFS. При этом протокол WMS применяется для передачи изображений, а протокол WFS — для передачи координатного и атрибутивного описания элементов дороги, разметки и знаков (см. рис. 6). Наборы данных могут передаваться в форматах GML или JSON. Для унификации информационного обмена и автоматизации процедур загрузки исходных данных разрабатывается специализированный классификатор, включающий необходимый состав объектов и атрибутов.

Рис. 6. Пример создания цифровой карты участка трассы М-11
с использованием дорожной лаборатории
В ходе подготовки к участию в презентации первого этапа проекта Федерального дорожного агентства «Караван» для обеспечения проезда беспилотных автомобилей была осуществлена цифровая съемка дороги с использованием подобной передвижной дорожной лаборатории на участке автодорожного подхода к Крымскому мосту (см. рис. 7). Полученная цифровая карта включает:
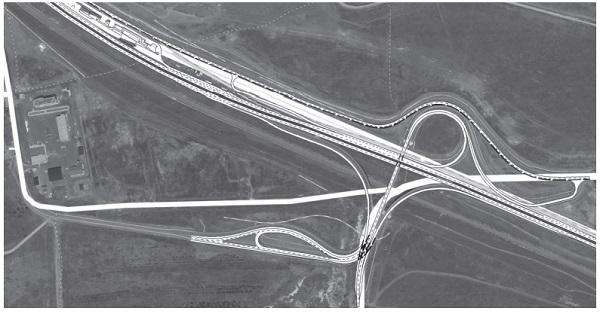
Рис. 7. Пример создания цифровой карты у Крымского моста
1) инфраструктуру — слой данных, описывающий объекты дороги, придорожной инфраструктуры и сервиса;
2) граф дорог, представляющий собой навигационную информацию высокой точности, представленную логической моделью дуг и узлов для построения и перестроения маршрутов движения. Граф дорог создается на основе линейных объектов, характеризующих осевые линии дорог, улиц, проездов и иных элементов дороги. В качестве исходных данных используются цифровые карты и планы. Дуги — это линии движения, а узлы — точки, в которых может быть выполнен маневр (поворот, разворот, перестроение). В составе графа могут быть применены дуги с односторонним или двусторонним движением. Двусторонние дуги могут быть получены по картам, на которых дороги представлены одной линией; односторонние дуги — по планам, где дороги отображаются площадными объектами с выделением полос движения. Сведения о количестве полос движения в одном направлении в графе отсутствуют, поскольку его основное назначение заключается в решении навигационных задач — построение и перестроение маршрутов движения. Для получения сведений о рядности (количестве полос движения в одном направлении) и порядке перестроения совместно с графом дорог используется слой «Дорога»;
3) навигационную информацию высокой точности, представленную логической моделью дуг и узлов для построения и перестроения маршрутов движения. При этом исходными данными для построения маршрута являются:
— координаты старта и финиша;
— тип транспортного средства (грузовой, легковой);
— планируемое время начала движения;
— максимально разрешенная скорость на участках дорог;
— максимально допустимый уклон;
— масса транспортного средства;
— высота транспортного средства;
— максимальная нагрузка на ось;
— минимальный радиус поворота.
Построение маршрута выполняется на основе заблаговременно созданного подробного графа дорожной сети. При этом выполняется анализ ограничений, накладываемых на движение конкретного транспортного средства в атрибутивном описании дуг графа: тип транспортного средства, максимальная масса, высота, максимальная нагрузка на ось. В случае его негабаритных размеров определяется радиус поворота дуг графа. Кроме того, учитывается возможный запрет движения в конкретное время суток и другие ограничения:
— условия движения, содержащие сведения оперативного мониторинга дорожной обстановки;
— текущий маршрут движения, построенный с учетом данных оперативного мониторинга дорожной обстановки, является результатом построения по графу дорог. В качестве исходной информации указывается точка текущего положения автоматизированного транспортного средства и желаемая конечная точка. При построении маршрута по графу дорог может использоваться дополнительная информация о текущих условиях движения (ДТП, дорожные заторы, ремонтные работы, осадки и пр.).
Следует также отметить, что для реализации ЦМД необходимо разработать:
— нормативную правовую базу использования единой информационной системы, функционирующую на базе облачных технологий;
— правила цифрового описания и цифровые классификаторы дорожной информации для цифровых электронных карт с учетом поддержки автоматизированной системы вождения;
— требования к отраслевым информационным базам данных в части унифицированного предоставления сведений внешним потребителям;
— формат и схемы пространственных данных для публикации цифровых электронных карт и отраслевых баз данных;
— опытный образец программно-аппаратного комплекса ЦМД, функционирующего на основе облачных технологий.
Разработка логической модели дуг и узлов для построения и перестроения маршрутов движения. Для определения оптимальных маршрутов движения автоматизированных транспортных средств и их безопасного скоростного режима информационная модель ЦМД включает следующие части:
— статическая составляющая ЦМД: фоновые данные, информация о дороге и цифровой граф дорог;
— динамическая составляющая ЦМД: информация о текущих условиях движения и маршруте движения;
— переменная составляющая ЦМД: информация «технического зрения» автоматизированных транспортных средств, необходимая для принятия решений по управлению движением ВАТС.
Статическая и динамическая составляющие ЦМД хранятся на серверах в базах данных. С учетом протяженности дорог Российской Федерации эти сведения могут составлять существенный объем данных. В то же время ЦМД в составе бортового вычислителя автоматизированных транспортных средств должна обеспечивать оперативное предоставление маршрута движения. Для решения этой задачи маршрут движения можно условно разделить на две составляющие: маршрут следования и линия движения.
Маршрут движения представляет собой совокупность последовательных однонаправленных дуг с соответствующими значениями основных параметров (табл. 1). В качестве примера можно привести пример с перестроением транспортного средства. В случае наличия на участке маршрута нескольких полос в одном направлении и отсутствия запретов на перестроение влево или вправо маршрут содержит все возможные полосы для перестроения. В случае отсутствия возможности прокладки участка маршрута без перестроения в соседние полосы соответствующие дуги должны иметь атрибут «Незамедлительное перестроение» для обеспечения заблаговременного перестроения и подготовки к повороту.
Таблица 1
Назначение параметров движения
| № |
Параметр |
Назначение |
| 1 |
Максимальная скорость |
Может отличаться от исходной максимальной скорости участка графа ввиду ограничений на максимальную скорость конкретного транспортного средства |
| 2 |
Максимальная скорость следующего участка |
Необходимо для плавного уравнивания скорости до конца текущего участка во избежание экстренного торможения |
| 3 |
Идентификатор следующей дуги |
Следующая за текущей дуга в случае отсутствия вынужденных перестроений |
| 4 |
Идентификатор дуги для перестроения вправо |
Следующая за текущей дуга в случае необходимости для перестроения вправо |
| 5 |
Идентификатор дуги для перестроения влево |
Следующая за текущей дуга в случае необходимости для перестроения влево |
| 6 |
Запрет остановки |
|
| 7 |
Запрет перестроения вправо |
|
| 8 |
Запрет перестроения влево |
|
| 9 |
Незамедлительное перестроение влево |
До окончания текущей дуги следует перестроиться в левую полосу движения |
| 10 |
Незамедлительное перестроение вправо |
До окончания текущей дуги следует перестроиться в правую полосу движения |
| 11 |
Длина участка |
Для определения текущего расстояния до конца участка |
| 12 |
Ширина покрытия, проезда |
|
| 13 |
Радиус поворота |
(«+» — левый поворот, «–» — правый поворот) |
ЦМД и кооперативные системы. Даже если будет создано совершенное ТС, которое будет вести себя как опытнейший водитель, оно сохранит те ограничения, которые были присущи человеку. Сенсорная система не может бесконечно далеко контролировать ситуацию, у нее всегда есть ограничения по дальности контроля. С 3-го уровня беспилотности уже необходимо прогнозировать ситуацию, так как в данном случае человеку должно предоставляться время на принятие управления на себя. Сказанное означает, что за это время беспилотник должен контролировать дорожную ситуацию и управление ТС. Переход управления должен быть гарантированным, чтобы водитель точно успел взять управление на себя, между тем иногда на это может требоваться довольно большой интервал времени. Нет ни одной сенсорной системы, которая позволит сканировать объекты на таком расстоянии, проехать которое можно за минуту. С помощью технического зрения решение задачи маловероятно, поэтому 3-й уровень предполагает обмен данными с другими транспортными средствами. При полноценном внедрении указанного уровня необходим информационный обмен между ВАТС и интеллектуальной дорожной инфраструктурой.
Разделение на кооперативную ИТС и ЦМД происходит следующим образом. Смысл кооперативного управления заключается в том, что управляющее воздействие формируется не в каком-то едином центре, а на местах, т. е. вырабатывается самими участниками дорожного движения. Этот принцип актуален, когда нет влияния на какое-то глобальное состояние системы. Например, вопрос о том, кто является первым при разъезде на нерегулируемом пересечении, не является стратегическим, а все тактические задачи могут решаться без подключения какого-то глобального центра управления. Таким образом, задачи делятся на тактические и стратегические. Тактические решаются на местах за счет обмена информацией между УДД и выработки ими требуемых решений в соответствии с регламентами и протоколами. Это аналогично тому, как в соответствии с правилами дорожного движения водители договариваются о том, кто уступает дорогу, а кто едет в приоритете, но только в кооперативных системах это безусловно: безусловная уступка и безусловный приоритет. В данных системах действует общая договоренность, которая доводится до каждого.
На дорогах часто возникают такие ситуации, которые беспилотнику самому трудно решить. Например, встраивание в поток при съезде с второстепенной дороги при въезде на автомагистраль. Если на автомагистрали настолько плотное движение, что тяжело найти разрыв в потоке для того, чтобы встроиться в него, то беспилотник будет ждать до тех пор, пока ему не уступят проезд или пока не снизится плотность потока. В реальности водители идут на нарушение и встраиваются с созданием аварийной ситуации, но при этом ДТП чаще всего не происходит, так как транспортное средство, следующее в потоке, сбавляет скорость для того, чтобы избежать столкновения (см. рис. 8).
В кооперативной системе описанная ситуация решается следующим образом. Три транспортных средства договариваются, их скорость изменяется, чтобы обеспечить разрыв, в который мог бы встроиться выезжающий на магистраль автомобиль (см. рис. 9). При этом можно задать частоту встраивания, чтобы соблюдался приоритет ТС, движущихся по магистрали. Эта задача уже является стратегической и решается с помощью ЦМД.
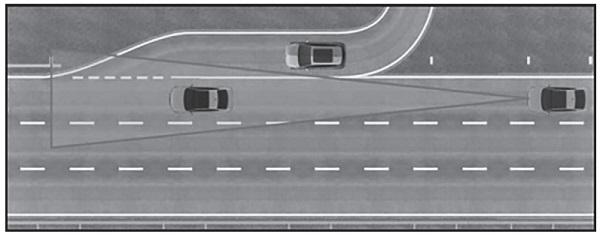
Рис. 8. Принятие решений на основе собственных данных
(условия ограниченной видимости)
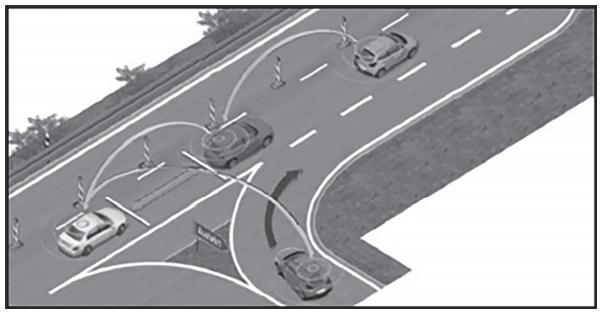
Рис. 9. Принятие решений на основе агрегированных данных
(условия полной видимости)
С развитием ЦМД можно управлять различными клиентскими группами, задавать различные приоритеты транспортных потоков, перенаправлять транспортные потоки, а также обеспечивать оптимальную загрузку дороги, обеспечивать безаварийность дорожного движения в рамках стратегического управления безопасностью всей УДС и эффективность транспортной сети. Кооперативные системы в тактическом уровне обеспечивают и безопасность движения в рамках разъездов в конфликтных точках, а также локальную эффективность проезда различных узлов и участков.
§ 3. Человеко-машинный интерфейс для автомобилей с высокой степенью автоматизации.
Необходимые компетенции водителя
Во многих современных автомобилях, эксплуатируемых на дорогах общего пользования, уже применяются технические и технологические решения частичной автоматизации процесса управления. Согласно критериям Ассоциации транспортных инженеров (SAE), такие системы подходят под 2-й уровень автоматизации, при котором водитель при активированной системе делегирует часть выполняемых им действий автоматизированным системам управления транспортным средством, однако при этом он обязан следить за окружающей обстановкой, не отпуская органы управления автомобилем. В качестве примера современных решений автоматизации управления можно указать модели известных мировых брендов премиум-класса: Mercedes-Benz, BMW, Volvo, Tesla и др. Чаще всего указанные решения представлены системами удержания полосы движения, адаптивного круиз-контроля и автоматической парковки транспортного средства.
Следует отметить, что регулирование и стандартизация в построении интерфейсов ограничены документами, регулирующими только расположение элементов управления. Отсутствие единого стандарта формирования интерфейса может снизить уровень безопасности при эксплуатации автоматизированных транспортных средств по причине отсутствия у пользователей категорий, понятных на интуитивном уровне, которые позволят быстро адаптироваться к новому техническому устройству вне зависимости от марки, модели и производителя.
Существует достаточно большое количество подходов к проектированию человеко-машинного интерфейса; в каждом из них рассматриваются важные составляющие для корректного и быстрого обмена данными между пользователем и системой.
Как уже говорилось, к настоящему времени определено всего шесть уровней автоматизации транспортного средства. Каждый последующий уровень отличается от предыдущего более расширенным арсеналом исполняемых задач, которые направлены на снижение роли человека в управлении транспортным средством. Сегодня полное исключение человека из системы управления невозможно как из-за технического несовершенства технологий управления и процесса принятия решений, так и из-за недостаточной проработки нормативных правовых аспектов.
Одним из барьеров на пути развития автоматизации транспорта выступает отсутствие дорожной инфраструктуры, которая потенциально должна нести в себе весомую часть информации о дорожных условиях и удовлетворять требованиям беспилотных транспортных средств. Но, несмотря на имеющиеся недостатки, проводится большое количество тестовых и полигонных испытаний, где беспилотные транспортные средства показывают высокие результаты, отрабатывая сценарии движения с минимальным количеством ошибок или вовсе без них.
Базовые составляющие процессов смены субъекта. Стандарт SAE j3016 «Классификация и систематизация, а также определения терминов, относящихся к системам автоматизации вождения для дорожных моторных транспортных средств» определяет уровни автоматизации, но не указывает на существенные отличия между ними. Согласно данному документу 2-й уровень автоматизации подразумевает непрерывное взаимодействие человека с системой, водитель постоянно контролирует автоматизированную систему вождения, корректируя при необходимости ее работу.
Немного другая ситуация будет происходить во время работы автоматизированных функций 3-го и 4-го уровней. Переход на более качественный уровень расширяет возможности систем и позволяет в определенных обстоятельствах отвлечься водителю от процесса управления и заняться личными делами внутри салона автомобиля.
Представим, что водитель находится в совокупности с роботизированным агентом, который способен выполнять некоторые сценарии движения, и вместе они составляют единую экосистему, внутри которой существуют два управляющих субъекта: 1) человек-водитель; 2) роботизированный агент, автоматизирующий процесс передвижения.
Полный контроль движения на протяжении всего пути (по крайней мере на текущем этапе развития технологии) агент поддерживать не в состоянии, поэтому последовательная смена субъекта в рамках одной поездки будет считаться приемлемым обстоятельством. В связи с таким положением возникает вопрос: каким образом осуществить безопасную передачу управления от агента к водителю без прекращения движения? Стандартный процесс передвижения подразумевает, что водитель постоянно находится в режиме получения, обработки информации из разных источников и на основе этого принимает решения о дальнейших действиях, направленных на безопасное управление транспортным средством.
Согласно базовой теории управления процесс управления автомобиля водителем состоит из пяти этапов (см. рис. 10). В этом случае имеет место цикличный процесс, так как по мере изменения дорожной ситуации порядок действий не изменяется, цикл управления начинается с получения новой информации и заканчивается контролем предпринятых действий:
1) получение информации;
2) обработка информации;
3) принятие решений;
4) выполнение действий;
5) контроль выполнения действий.
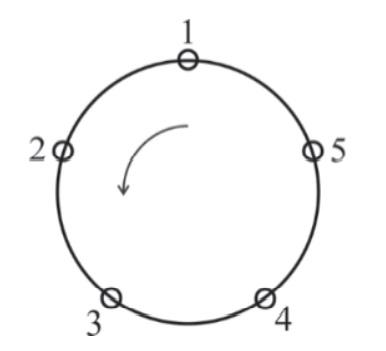
Рис. 10. Петля управления транспортным средством
Если же функция управления лежит на роботизированном агенте, то его действия будут мало чем отличаться от действий водителя. Как и водителю, агенту необходимо осуществлять те же действия, т. е. проводить сбор информации, ее обработку, выбор сценария управления, совершать управляющие воздействия и осуществлять контроль за выполнением этих действий.
Автономные системы проектируются таким образом, чтобы информация об активных функциях и окружающей обстановке поступала непрерывно и с достаточно большой частотой с целью минимизирования или исключения временны́х потерь. Система детектирования постоянно находится в активном состоянии, соответственно роботизированный агент осведомлен о дорожной обстановке и ситуации в салоне или кабине транспортного средства в каждый момент времени при эксплуатации транспортного средства. Если обстановка соответствует требованиям, заложенным сценариями, то роботизированный агент может беспрепятственно принять управление транспортным средством на себя.
На случай нештатных ситуаций в системы автоматизированного управления заложен защитный механизм от ложной передачи управления. Иными словами, агент не сможет принять управление на себя, если хотя бы один элемент в системе функционирует некорректно (или не функционирует вовсе), отсутствуют сценарии действий или система получает недостаточно информации, что в значительной мере снижает безопасность движения.
Обратный процесс, т. е. принятие управления человеком, является более сложным как с точки зрения безопасности, так и функционального исполнения, поскольку водитель может обладать неполными сведениями о дорожной обстановке и быть не готовым принять управление, что ставит под сомнение вопрос об успешной смене субъекта управления транспортным средством. Проектируемые системы по умолчанию имеют набор базовых алгоритмов, задачей которых является разрешение потенциально опасных ситуаций. Процесс смены субъекта может быть представлен в двух вариантах:
1) привлечение внимания водителя и информирование его о том, что требуется принять управление на себя. В данном случае важно получение обратной связи о том, что водитель готов принять управление и система беспилотного управления деактивирована;
2) в случае отсутствия обратной связи происходит активация и исполнение сценария вынужденной остановки.
Доверие к системе. Доверие к функциям автоматизации процессов является важным фактором для использования и принятия различных систем в различных областях. Рассматривая уровень доверия как величину, стоит отметить, что при ее низком уровне задействование полного функционала систем становится попросту невозможным ввиду постоянного прерывания процесса исполнения алгоритмов водителем или оператором. В конечном счете это негативно сказывается на приемлемости, комфорте и безопасности функционирования автоматизированных систем.
В сети можно найти достаточно большое количество видеороликов, где демонстрируется высокий уровень доверия пользователей во время функционирования автоматизированной системы управления. Вместе с этим происходит практически полное отвлечение внимания, а в некоторых случаях игнорирование требований, связанных с взаимодействием с управлением автомобилем. Такие видеоролики формируют неверное представление о возможностях функций автоматизации и способствуют неправильному формированию понимания эксплуатации систем такого уровня, поскольку доверие к автоматизации принимается как уверенность в том, что система будет действовать в соответствии с тем, что ожидает пользователь, включая дополнительные преимущества этой системы для водителя. В свою очередь, уровень доверия к автоматизированному вождению связан с конкретными сценариями, настройками и характеристиками транспортного средства, а также наличием у водителя опыта работы с определенными функциями.
Таким образом, важнейшей задачей создания человеко-машинного интерфейса является способность калибровки уровня доверия для каждого конкретного пользователя. Калибровку в данном контексте следует рассматривать как наличие точных знаний о возможностях системы.
Глубина погружения. Глубину погружения (R) в процесс вождения иначе можно обозначить как значение уровня осведомленности о дорожной обстановке. Глубина погружения представляет собой некую величину, выраженную в виде отношения числа каналов, от которых поступает информационный сигнал, к числу действий обратной связи. Таким образом, для каждого из трех режимов (полное управление, контроль управления агента, состояние отвлечения) будет определяться своя глубина погружения.
Более наглядно данное положение характеризует так называемая петля управления транспортным средством, оборудованным автоматизированной системой управления (см. рис. 11).
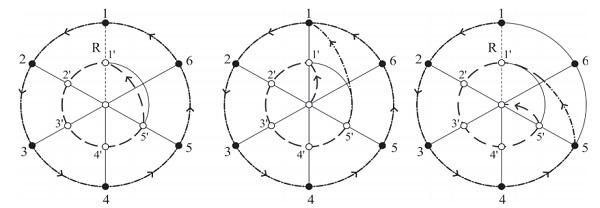
Рис. 11. Петля управления транспортным средством, оборудованным автоматизированной системой управления
К критическим точкам глубины погружения относятся:
1 — полное погружение в процесс вождения; говорит о том, что управление транспортным средством происходит в ручном режиме (водителем);
11 — управление транспортным средством осуществляется роботизированным агентом, при этом водитель контролирует данный процесс;
0 — управление транспортным средством осуществляется роботизированным агентом, при этом водитель полностью отвлечен от данного процесса.
Стоит отметить, что во время движения транспортного средства у водителя не всегда заблокированы абсолютно все каналы получения информации (за исключением состояния сна), поэтому в большинстве случаев глубина погружения будет определяться точкой, расположенной между 0 и 11.
Точки, расположенные по большому радиусу под номерами 1–6, соответствуют этапам управления автомобиля человеком. Иными словами, присутствие на любой точке внешнего радиуса определяется как прохождение закономерного этапа ручного управления автомобилем. Точки, расположенные по малому радиусу под номерами 1′–6′, соответствуют этапам ручного режима управления, но так как управляющие воздействия исполняются роботизированным агентом, человек выполняет контролирующую функцию, оценивая каждое действие:
1′ — получение информации;
2′ — обработка полученной информации;
3′ — оценка принятого управляющего воздействия;
4′ — оценка исполненного управляющего воздействия;
5′ — оценка эффективности исполненного управляющего воздействия;
6′ — корректировка управляющего воздействия.
Первые три этапа являются важнейшими в цикле, поскольку именно от них зависит качество решений, при этом о качестве взаимодействия с информацией следует говорить в контексте ситуационной осведомленности.
Определение ситуационной осведомленности существует в нескольких видах, но общий смысл заключается в восприятии элементов окружающей среды в пространстве и времени, понимании их значения и прогнозировании их состояния в краткосрочной перспективе. Подход к обработке информации лучше всего представлен теоретической трехуровневой моделью ситуационной осведомленности Эндсли. Первоначально модель Эндсли разрабатывалась для понимания авиационных задач, но ее можно распространить и на другие области. Любая задача, требующая от людей отслеживания событий, выступает потенциальным кандидатом для исследования и применения ситуационной оценки. Модель разделена на три иерархических уровня ситуационной оценки, причем каждый этап является необходимой подосновой для следующего более высокого уровня. Модель выглядит в виде цепочки обработки информации, начиная с ее восприятия и заканчивая прогнозированием действий.
Уровень 1. Восприятие элементов окружающей среды. Данный уровень является самым низким уровнем ситуационной осведомленности и связан с восприятием водителем информации от бортовых устройств, поведения подконтрольного транспортного средства и дорожной обстановки, также учитывается и поведение (состояние) других людей, находящихся в транспортном средстве. На этом этапе интерпретация информации не производится. Имеет место первоначальное получение информации в необработанном виде. Получение данных позволяет водителю определять состояние многих переменных (например, обороты двигателя, направление движения, скорость движения), но в дальнейшем их интеграция проводиться не будет.
Уровень 2. Понимание текущей ситуации. Оно следует из качества восприятия элементов. Данные могут быть интегрированы и синтезированы для дальнейшего понимания актуальности задач водителя. Осознание текущей ситуации важно для анализа значения переменных с целью обновления статуса — получения информации о том, что происходит в настоящее время (направление движения, оставшееся время в пути и т.д.). Таким образом, водитель проводит анализ того, могут ли его действия привести к ожидаемым результатам. Эндсли утверждает, что достижение данного уровня понимания является признаком опыта водителя.
Уровень 3. Прогнозирование. Самый высокий уровень осведомленности связан со способностью прогнозировать будущее состояние элементов окружающей обстановки. Точность прогноза зависит от точности предыдущих уровней (1 и 2). Прогнозирование будущей ситуации дает водителю время для разрешения конфликтов и планирования действий, что в свою очередь позволяет своевременно устранить возможные проблемы.
Улучшение ситуационной осведомленности. Эндсли также утверждает, что при проектировании системы следует пытаться поддерживать или повышать уровень ситуационной осведомленности. С целью реализации данного положения им был предложен следующий набор критериев проектирования интерфейса:
— уменьшение требований к операторам по выполнению расчетов;
— предоставление данных таким образом, чтобы упростить процессы понимания (уровень 2) и прогнозирования (уровень 3);
— предоставление информации, соответствующей целям;
— вывод индикаторов текущего режима или состояния системы, которые помогут определить соответствующую ситуационную осведомленность;
— вывод критических сигналов для привлечения внимания во время критических событий;
— создание глобальной ситуационной осведомленности, которая будет поддерживаться путем обзора ситуации исходя из целей и задач оператора;
— системная поддержка прогнозирования будущих событий и состояний;
— мультимодальный проект системы, который будет предоставлять данные из разных источников одновременно, а не последовательно, что необходимо для поддержки параллельной обработки информации.
Большинство перечисленных критериев указывает на создание качественного дизайна устройств передачи, но по большому счету ситуационная осведомленность — это общий когнитивный навык, который является неотъемлемой частью всех ситуаций, требующих экспертной работы в динамических, сложных и неопределенных условиях. Развитие данного навыка возможно при обучении различным аспектам ситуационной осведомленности, т.е. для безопасного управления транспортным средством, оборудованным системой автоматизированного управления, требуется соответствующая подготовка:
— практика в мониторинге соответствующих дисплеев — для повышения качества восприятия;
— использование расширенных контрольных списков — для повышения времени жизни соответствующих данных;
— обучение в распределении внимания;
— практика многозадачности;
— обучение распознаванию и сопоставлению с образцом.
Согласно модели Эндсли (см. рис. 12) состояние ситуационной осведомленности является результатом процесса анализа и оценки ситуации и включает в себя:
— знание того, что происходит вокруг;
— осознание значений собственных действий и действий других участников ситуации (роботизированного агента);
— представление сценария развития ситуации.
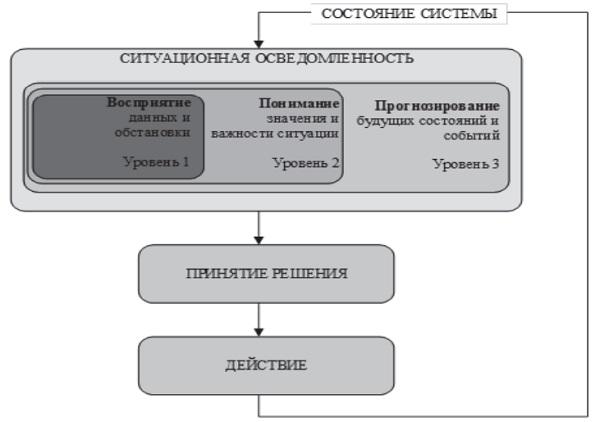
Рис. 12. Ситуационная осведомленность
Знание и понимание дорожной обстановки важно одновременно для обоих субъектов управления (роботизированный агент и водитель).
Осведомленность роботизированного агента поддерживается исполнением следующих уровней:
уровень 1 — восприятие или сбор данных. Происходит в режиме реального времени с записью хронологии действий водителя;
уровень 2 — понимание. Заключается в том, что система в любой момент времени способна принять управление на себя и для этого необходимо владеть информацией о прошлых действиях и параметрах настоящей ситуации;
уровень 3 — прогнозирование. Заключается в способности корректировки режима движения при действиях обоих субъектов управления.
К уровням осведомленности водителя следует отнести:
уровень 1 — восприятие. Заключается в способности полномерно воспринимать текущую информацию из окружающей среды и бортовых индикаторов автомобиля;
уровень 2 — понимание. Представляет собой осознание характера движения (текущее положение автомобиля в полосе, его скорость и направление);
уровень 3 — прогнозирование. Представляет собой попытку представить, каким образом изменится характер движения при принятии управления.
Стимулирование необходимого уровня внимания. Соответствующий уровень внимания водителя во время автоматизированного движения напрямую связан с требуемым уровнем безопасности. Желаемый уровень безопасности функционирования автоматизированных систем заключается в том, что число аварий и конфликтов не должно увеличиваться по сравнению с вождением в ручном режиме.
Если надежность системы постоянна, то и уровень внимания водителя, который может потребоваться в любой момент времени, вполне может быть определен. В системе, где присутствует человек, показатель надежности не может быть постоянной величиной ввиду наличия человеческого фактора.
Существует большая разница между взаимодействием пользователя с транспортным средством через активный контроль и простым наблюдением за его работой (см. рис. 13).

Рис. 13. Типы взаимодействия пользователя с ТС
При ручном управлении одновременно работают циклы управления и мониторинга, а при автоматизированном только циклы мониторинга. Таким образом, существуют два выхода из цикла:
1) выход из цикла управления;
2) выход из цикла управления и мониторинга.
В данном случае возникает вопрос: будет ли пользователь интерпретировать удаление из цикла управления, подразумевая и отсутствие необходимости мониторинга? Движение без контакта с органами управления автомобилем («вождение без рук») будет приравниваться к тому, что необходимость постоянного мониторинга процесса исчезнет. Это было обнаружено в эксперименте, проводимом на симуляторе вождения, когда участникам было предложено заниматься своими делами, если они этого пожелают. Те участники, которые имели опыт использования систем адаптивного круиз-контроля совместно с системой удержания полосы, отвлекались на второстепенные дела на протяжении 43% времени передвижения при автоматизированном управлении.
С точки зрения пользователя совершенно логично, что система, которая берет на себя управление и удерживает транспортное средство на своей полосе движения, не нуждается в помощи со стороны водителя.
Поскольку современные автоматизированные системы 2-го уровня еще подвержены ошибкам в нештатных ситуациях, точно определить время, когда необходима помощь со стороны пользователя, невозможно. Таким образом, разработка систем оповещения об экстренной передаче управления водителю не представляется возможной.
Требуемый уровень внимания должен поддерживаться на протяжении всей поездки, а не ситуативно. При проектировании систем основной стратегией должно быть противодействие последствиям выхода из цикла управления и мониторинга. Создание постоянного информационного потока о статусе системы позволит привлечь внимание пользователя и не допустить выхода из крайнего цикла мониторинга. Для систем 2-го уровня автоматизации производители используют ряд индикаторов, имеющих разные цвета в зависимости от статуса, например, рулевое колесо на панели приборов. Проектируемые в настоящее время системы требуют всегда держать руки на рулевом колесе, а в случае нарушения таких требований водитель получит предупреждение. Интервал времени, после которого появляется предупреждение о снятии рук с рулевого колеса, различается в зависимости от производителя и варьируется от нескольких секунд до нескольких минут.
Обеспечение физического комфорта. Что касается ускорений/замедлений, то комфорт не обязательно зависит от величины данных параметров. Более важным фактором является продолжительность их воздействия на человека. Слабый раздражитель не вызывает дискомфорт у пользователей при условии, что он действовал непродолжительное время. Дискомфорт появляется, если раздражитель возникает достаточно часто и воздействует достаточно долго.
Когда водитель или пассажир видит гладкую или ровную дорожную поверхность, по которой движется транспортное средство, то он ожидает отсутствия вибраций, что, в свою очередь, делает сами вибрации еще более раздражающими при их возникновении. С точки зрения автоматизированного вождения также будет присутствовать влияние ожиданий поведения транспортного средства на общий уровень комфорта. Если автоматизированный автомобиль поведет себя не так, как ожидают пользователи, это безусловно приведет к дискомфорту.
Одной из проблем, которая характерна для автоматизированных транспортных средств, выступает потенциальное проявление морской болезни. В случае, если человек не занимается управляющей деятельностью или сидит спиной к движению в автоматизированных транспортных средствах, присутствует риск укачивания. По результатам экспериментов после 15 минут направленного взгляда с опущенной головой (обусловлено расположением средств отображения информации) 25% участников испытывали некоторый дискомфорт из-за укачивания. Через 35 минут это значение увеличилось до 50%. Для дисплеев, расположенных на уровне головы, число раздраженных составило почти вдвое меньше: 13% через 15 минут и 27% через 35 минут. Таким образом, некоторые решения, направленные на повышение комфорта, могут быть найдены с помощью правильного расположения средств отображения информации.
Отдельно стоит отметить то, что, помимо дискомфорта, укачивание может также представлять серьезную угрозу для работы в случае запроса на передачу управления.
Понятие комфорта. Важным аргументом в пользу использования автоматизированных функций на транспорте является обеспечение или повышение уровня комфорта. Продвижение автоматизированных функций как систем обеспечения комфорта, а не систем безопасности, указывает на то, что водитель по-прежнему несет ответственность за безопасность во время передвижения.
С повышением уровня автоматизации предоставление комфорта может заключаться не только в системах помощи водителю. Появление дополнительного комфорта обусловливается предоставлением человеку свободного от вождения времени с целью его более рационального использования. Свободное время дает человеку возможность отдохнуть от трудовой деятельности или заняться личными делами. Как в первом, так и во втором случае занятие второстепенной от вождения деятельностью связано с практически полным отвлечением внимания от процесса движения.
Комфорт включает в себя не только физический, но и психологический компонент и определяется как субъективное чувство приятного вождения/езды на автомобиле в отсутствие как физиологического, так и психологического стресса.
Физический комфорт связан с такими элементами, как вибрация транспортного средства или кресла, силы, действующие на тело (поперечное и продольное ускорение), конструкция кресла, его положение (настройки). Психологический комфорт относится к более субъективным ощущениям простоты или удобства.
Следует обратить внимание, что физический и психологический комфорт очень субъективны и зависят от конкретного человека. Большинство исследований, в которых упоминается комфорт вождения с помощью автоматизированных функций, не дают определения понятию комфорта.
Перечень компетенций водителя транспортного средства с высокой степенью автоматизации управления. Основной функцией водителя при управлении транспортным средством с высокой степенью автоматизации является функция по резервированию автоматики. В ходе анализа поступающей информации о состоянии системы (автомобиль-дорога-среда) и прогнозировании ее развития водитель должен быть готов к принятию сложных, ответственных решений.
Водитель обязан выполнять функцию по резервированию автоматики в изначально неизвестных и неопределенных ситуациях. На безопасность управления оказывают влияния следующие факторы:
— эргономическое несовершенство рабочего места;
— особые условия деятельности (дефицит времени и монотония, опасность для жизни, температурные и вибрационные нагрузки, неблагоприятный состав воздуха и др.), приводящие к снижению работоспособности и изменению функционального состояния водителя;
— недостаточный уровень профессиональной подготовленности;
— сложные социально-психологические условия организации поездки.
Данные факторы являются объективными предпосылками уменьшения надежности системы автомобиль–дорога–среда.
Осуществление водителем функции по резервированию транспортного средства с высокой степенью автоматизации управления затрудняется тем, что в автоматических режимах он исключается из непосредственного управления. Это приводит к снижению его активности, что является предпосылкой ошибочных действий при переходе к ручному режиму.
В процессе движения транспортного средства с высокой степенью автоматизации должны быть обеспечены быстрые переходы от одного режима к другому, что особенно важно при выполнении опасных маневров (выезд на нерегулируемое пересечение, проезд железнодорожных переездов, осуществление обгонов и др.). С точки зрения безопасности дорожного движения необходимо, чтобы осуществление опасных маневров не происходило неожиданно для водителя.
Двигаясь по дороге, водитель выполняет функцию слежения-регулирования. Он сохраняет величину заданного параметра, а также целенаправленно изменяет величину какого-либо из них. Во многих случаях командой для внесения дополнительных коррекций в управлении служит зрительный сигнал, точнее, величина его изменения по сравнению с нужным или заданным значением (процесс рассогласования). В ряде случаев управление транспортным средством осуществляется путем анализа информации, поступающей через слуховой анализатор.
Управление транспортного средства с высокой степенью автоматизации является частным случаем биомеханической системы водитель (оператор) — транспортное средство, в которой управляющей частью является водитель-оператор. При рассмотрении замкнутых систем управления с участием оператора необходимо учитывать накапливание отклонений (∆R), которые возникают в период между интервалами контроля параметров движения и приложением управляющего воздействия (∆t). Для обеспечения надлежащей точности системы управления ТС с участием водителя (оператора) следует выбирать определенную периодичность контроля.
Управление транспортного средства с высокой степенью автоматизации работает по принципу «слежение с преследованием» или по принципу «слежение с компенсацией».
В случае «слежение с преследованием» водитель-оператор видит величину входного и выходного сигнала. Задача заключается в том, чтобы свести к минимуму рассогласование между отметкой цели и расположением автомобиля. В случае слежения компенсаторного типа оператор видит только рассогласование между воздействием на органы управления транспортного средства и выходом (положением) системы.
Функция водителя в такой сложной системе управления сводится в основном к компенсаторному слежению по многим индикаторам, операциям контроля величины скоростного режима, положения автомобиля на дороге, соответствия заданному маршруту, обобщению результатов контроля и сравнению их с планом действия, выработке решений по переходу на ручное управление ТС и реализация этого решения через органы управления путем приложения соответствующего воздействия на них.
На данный момент необходимо пересмотреть задачи водителя в классическом их понимании исходя из изменения условий действия водителя-оператора. На 3-м уровне автоматизации водитель «выключается» из процесса активного управления автомобилем, но при этом он активирует функции оператора, контролируя процесс движения автомобиля. Повышение степени автоматизации управления транспортным средством требует от водителя-оператора высокой готовности к экстренным действиям. На данном этапе невозможно полностью исключить водителя из процесса управления транспортным средством, таким образом, мы рассматриваем существующие проблемы в рамках системы водитель–автомобиль–дорога–среда (ВАДС).
В общем случае систему ВАДС можно назвать недетерминированной. Недетерминированные системы характеризуются наличием в процессе управления непредвиденных ситуаций, при решении которых жесткая программа не способна удовлетворить потребности системы. В данных ситуациях, для того чтобы задача могла быть выполнена, необходимо вмешательство человека-оператора, принимающего то или иное решение. Решение, принятое водителем в процессе управления транспортным средством, должно удовлетворять условиям обеспечения безопасности дорожного движения. С точки зрения водителя-оператора транспортного средства с высокой степенью автоматизации, надежность системы ВАДС напрямую зависит не только от безошибочности его действий, но и от безотказной работы всех систем данного транспортного средства.
Есть ряд условий, предписывающих экстренный переход от автоматического режима к ручному управлению. Самое очевидное — это техническая неисправность какого-либо из элементов беспилотного ТС (лидары, камеры слежения) или непосредственно автомобиля. На данный момент у лидара отсутствует техническая возможность обеспечить 100% надежность в сложных дорожных условиях (туман, снегопад и т.п.). К сбою может привести поведение других участников дорожного движения, допускающих нарушения ПДД (превышение скоростного режима, обгон в неположенном месте и т.п.).
При неожиданно возникающей технической неисправности возникает вопрос о возможности водителя (оператора) перейти на ручное управление. Осуществляя только слежение, водитель-оператор может быть не готов с точки зрения психофизиологии принять управление транспортным средством на себя.
Таким образом, водитель-оператор выполняет некоторые функции, несвойственные водителю, управляющему транспортным средством с нулевым или первым уровнем автоматизации. К основным отличиям стоит отнести:
— высокая степень готовности включиться в процесс управления при возникновении нештатной ситуации;
— необходимость принятия решения в условиях ограниченного времени и при недостатке исходной информации;
— быстрая смена видов операторской деятельности.
К деятельности оператора-водителя транспортных средств с высокой степенью автоматизации предъявляются требования не только к основным навыкам управления транспортным средством, но и в большей степени к способности сохранять высокий уровень внимания, опыту водителя, умению моделировать и прогнозировать возможные варианты развития событий, психологической готовности принятия ответственных решений в экстремальных условиях.
Обеспечение психологического комфорта. Вне контекста процесса управления транспортным средством пребывание в зоне комфорта описывается как поведенческое состояние, в котором человек действует в нейтральном по отношению к тревоге состоянии с использованием ограниченного набора моделей поведения для обеспечения устойчивого уровня производительности, которое обычно сопровождается отсутствием чувства риска.
Относительно автоматизированных функций типичная мера психологического комфорта представляет собой некий субъективный признак простоты или удобства использования, связанный с тем, работает ли транспортное средство в соответствии с пожеланиями или представлениями пользователя. Психологический комфорт ощущается, когда водители чувствуют себя непринужденно и уверены в том, что автомобиль будет демонстрировать ожидаемое поведение и передвигаться в заданном направлении без потери контроля.
Поскольку автоматизированное вождение является относительно новым технологическим решением, то и число людей, задействованных в испытаниях, было незначительным. Автоматизированная система классифицируется по нескольким уровням, поэтому люди могут чувствовать себя некомфортно из-за неуверенности в предоставляемых системой возможностях.
Ожидания комфортного движения основываются на опыте ручного управления, а стили вождения в значительной мере зависят от поведенческих аспектов самих водителей. Исходя из этого положения возникает следующий вопрос: должно ли транспортное средство под управлением автоматизированной системы вести себя так же, как под управлением водителя?
Ранние исследования показали, что водители не хотят, чтобы автоматизированная система копировала их вождение. В исследованиях Де Гелдера показано явное разнообразие предпочтений между водителями в реальных ситуациях во время работы автоматизированной системы управления. Зачастую комфорт водителей находился не на самом высоком уровне при копировании системой их стиля вождения.
При наступлении какой-либо ситуации во время ручного управления водитель знает, что он будет делать. В случае автоматизированного транспортного средства водитель понимает, что будет делать система, только после того, как она начнет реагировать с соответствующей обратной связью. Иными словами, для осуществления смены полосы движения в автоматизированном режиме водителю необходимо обнаружить всю необходимую информацию о будущем маневре. Только в этом случае процесс смены полосы движения будет происходить в безопасном и комфортном режиме.
Одним словом, для снижения уровня неопределенности, стресса и психологического дискомфорта достаточно того, что автоматизированный автомобиль будет вести себя предсказуемо в соответствии с общими правилами дорожного движения.
[10] См.: Кооперативный ИТС Коридор Роттердам — Франкфурт — Вена // URL: https://c-its-korridor.de/ (дата обращения: 29.05.2020).
[9] См.: Встреча G7 в Германии, сентябрь 2015 г.: Декларация G7 об автоматизированном и связанном вождении // URL: http://www.g8.utoronto.ca/transport/G7-declaration-on-automated-and-connected-driving.pdf (дата обращения: 29.05.2020).
[8] Сотрудничество в данном случае означает, что транспортные средства предупреждают друг друга о потенциально опасных ситуациях (например, экстренное торможение или очередь в конце транспортного затора) и связываются с местной дорожной инфраструктурой (например, светофоры для получения оптимальной скорости). Кроме того, двусторонняя связь между транспортными средствами и центрами управления движением позволяет быстрее выявлять проблемы (например, заторы на дорогах или гололед) и смягчать их последствия, быстрее информируя участников дорожного движения.
[7] См.: Постановление Правительства РФ от 26 ноября 2018 г. № 1415 «О проведении эксперимента по опытной эксплуатации на автомобильных дорогах общего пользования высокоавтоматизированных транспортных средств» (вместе с «Положением о проведении эксперимента по опытной эксплуатации на автомобильных дорогах общего пользования высокоавтоматизированных транспортных средств») // СПС «КонсультантПлюс».
Глава II.
МЕХАНИЗМ ТРАНСПОРТНОГО ПРЕСТУПЛЕНИЯ
§ 1. Понятие, элементы и общая характеристика механизма транспортного преступления
При определении механизма транспортного преступления необходимо исходить из характеристики транспорта. Железнодорожный, воздушный и водный транспорт представляют собой типичные полиэргатические системы, т. е. «физические, целенаправленные замкнутые системы, включающие в себя человека как главное, решающее звено»11; автомобильный транспорт, как правило, — моноэргатическую систему. В литературе их еще называют социотехническими системами или системами «человек–машина» (СЧМ). В эргатической системе встречаются все формы взаимодействия объектов друг с другом, при этом человек влияет на складывающиеся в ней отношения.
Эргатические системы, имеющиеся на транспорте, отличаются между собой по количеству операторов, степени непрерывности участия человека в процессе управления, виду связи оператора с объектом управления.
По первому признаку выделяются моно- и полиэргатические системы. В первом случае их обслуживает один человек, во втором — коллектив операторов. Моноэргатических систем на транспорте, как правило, больше; они не изолированы друг от друга, выступают как соподчиненные или равнозначные элементы, в совокупности составляя полиэргатическую систему.
По степени непрерывности участия человека в управлении различаются системы, в которых оператор работает в режиме немедленного или отсроченного обслуживания. Управляющее воздействие на объект в первом случае совершается с учетом получаемой информации, оценки ситуации и т. д. Нарушение степени непрерывности в управляющем воздействии (когда управляющий субъект либо вообще «выпадает» из системы, либо допускает ошибки) может обусловить аварийность транспорта. Задача в этом случае заключается в выяснении причин ошибочных действий, что в свою очередь позволяет формулировать рекомендации, нацеленные на устранение дефектов поведения работника транспорта, усиление его «эксплуатационной» надежности.
В режиме так называемого отсроченного обслуживания действует большинство операторов автоматических систем управления. Но надо сказать, что нет раз и навсегда заданного режима, иногда они предусмотрены оба. Однако следует иметь в виду, что переход от одного режима к другому (в частности, от автоматического управления к ручному и наоборот) требует дополнительных усилий со стороны управляющего субъекта. Это объясняется тем, что для перехода к новому динамическому стереотипу сбора информации и сенсомоторной координации нужно определенное время. Изменяется и динамический стереотип преобразования потока поступающей информации в управляющее воздействие, а следовательно, повышается психофизиологическое напряжение12, что иногда приводит к неблагоприятным последствиям.
В зависимости от того, находится ли оператор непосредственно на объекте управления или осуществляет управляющее воздействие на расстоянии, на транспорте выделяются системы прямого воздействия и системы с дистанционной связью.
Эргатические системы можно классифицировать и с других позиций, например, по роли и месту в них человека. От того, принимает ли субъект участие в выработке решения и формировании управляющего воздействия или он сам служит объектом, во многом зависит характер взаимоотношений между элементами системы. Определяющим может быть и тип задачи управления. Наконец, важной отправной точкой классификации служит число целей, для достижения которых предназначена эргатическая система. Это позволяет выделить два больших класса систем: одноцелевые и многоцелевые.
Все эргатические системы транспорта иерархические. Дело в том, что, осуществляя процесс управления, отдельные их части выполняют различные функции. Однако не только функции, но и этапы, на которых системы с помощью разнообразных средств и способов достигают цели управления, неравнозначны. Каждое предыдущее воздействие влечет за собой последующее: нет причины — не будет и следствия. Это основной принцип иерархических систем, построенных по признакам подчинения, важности отдельных этапов работы.
Главная проблема иерархических систем — координация действий по принятию решения. В любой из систем несколько подсистем нижнего уровня управляют отдельными процессами, составляющими общий процесс управления, и подчинены одной системе высшего уровня. Такие системы в качестве отдельных блоков или модулей входят в большие и сложные системы управления. Причем каждая подсистема нижнего уровня может представлять собой человеко-машинную систему, обладающую свободой действий при выборе управляющих решений в пределах своей компетенции.
Чтобы управляющее воздействие низших подсистем смогло привести к оптимальному решению задачи, подсистема вышестоящего уровня должна предварительно оптимизировать задаваемый набор критериев эффективности.
В эргатических системах влияние подсистемы высшего уровня на низшие чаще выражается в координации их деятельности. Управляющий субъект в иерархической эргатической системе может занимать любой уровень. Чем выше степень организованности, тем более сложна координация деятельности подсистем — основной вид управляющего воздействия в эргатических системах.
Таким образом, изучение транспорта как полиэргатической системы может и должно осуществляться как исследование единого функционального целого. При этом нельзя не учитывать, что при таком подходе криминология и уголовное право могут обогатиться за счет объединения технических дисциплин и наук о человеке и его трудовой деятельности, описания характеристик человека как компонента автоматизированной системы. Речь идет о процессах восприятия информации, принятия решений, исследовании движений и других эффекторных процессах, проблемах мотивации, готовности к деятельности, стрессах, коллективной деятельности операторов. С точки зрения обеспечения безопасности транспорта важное значение имеет изучение влияния монотонности операций, условий работы, физических факторов окружающей среды, биомеханических и физиологических факторов на управляющего субъекта.
Эти и другие аспекты безаварийного функционирования транспорта целесообразно исследовать в рамках механизма транспортного преступления. Правда, следует отметить: с одной стороны, криминологи признают, что более продуктивным в изучении детерминации преступного поведения является детальный анализ механизма совершения преступления, поскольку он предполагает выявление не только всего комплекса событий, явлений, процессов и свойств личности, но и их взаимодействия, а также роли каждого из факторов в преступлении13. С другой стороны, дефиниция механизма транспортного преступления представлена лишь в нескольких работах, между тем уголовно-правовой характеристике транспортных преступлений, в первую очередь автотранспортных, посвящено немалое количество исследований14.
Выработка указанного понятия имеет принципиальное значение. Она позволит не только очертить круг элементов, включаемых в механизм данного преступления, но главное, проникнуть в сущность исследуемого явления.
В литературе дается определение преступного поведения, под которым понимаются «…связи и взаимодействие внешних факторов объективной действительности и внутренних, психических процессов и состояний, детерминирующих решение совершить преступление, направляющих и контролирующих его исполнение»15. При этом преступное поведение представляется как процесс, протекающий в пространстве и во времени, включающий не только сами действия, изменяющие внешнюю среду, но и предшествующие им психологические явления и процессы, которые и определяют механизм противоправного поступка.
Из сказанного, на наш взгляд, видно, что, строго говоря, речь идет о «микромире» антиобщественных явлений, т. е. об обстоятельствах, характеризующих личность преступника и влияющих на формирование субъективных причин противоправного поведения. В это определение не включен «макромир», в котором возникают и действуют криминогенные факторы — социальные условия жизни людей, оказывающие влияние на их поведение.
Классификация механизмов преступного поведения также убеждают в этом. Выделяются четыре основные группы, связанные: 1) с деформацией потребностей и интересов личности; 2) с расхождением (противоречием) между потребностями (интересами) и возможностями субъекта; 3) с деформацией нравственных и правовых представлений, ценностных ориентаций и социальных установок личности; 4) с дефектами процесса принятия и осуществления решения.
Нетрудно заметить, что определение механизма преступного поведения и его классификация почти полностью ориентированы на умышленные преступления; они не охватывают деяния, совершаемые по неосторожности. Правда, некоторые авторы полагают, что характерным для преступления по неосторожности является механизм принятия ошибочного решения, суть которого состоит в неверной оценке (отсутствии предвидения) реально грозящих вредных последствий16.
Нам представляется неверным сводить всю совокупность криминогенных факторов неосторожных преступлений, в том числе и так называемой технической преступности, к неправильно принятому решению либо к недостаткам его исполнения. Очевидно, что механизм некоторых преступлений иной. Так, одной из причин аварий на железной дороге является то, что машинисты локомотивов засыпают во время работы. Причем среди ряда факторов, способствующих этому (не всегда разумная организация труда, недостатки профотбора и текущего контроля за состоянием здоровья и т. д.), особую роль играют обстоятельства, связанные с тенденциями развития железнодорожного транспорта: увеличение скорости движения и плавности хода, автоматизация труда машиниста. Первый фактор приводит к перегрузке зрительного анализатора большим потоком однообразной информации и развитию гипнотического состояния, а также к укачиванию из-за ритмичного мягкого воздействия на отолитовый аппарат. Вторая тенденция вызывает снижение объема активных мышечных операций машиниста, противодействующих укачиванию17.
Механизм преступления, совершенного машинистом в таком состоянии, никак не связан ни с принятием решения, ни с его исполнением. Поэтому профилактика подобных случаев в первую очередь должна быть направлена на нейтрализацию неблагоприятного влияния условий труда на человека.
Практика показывает, что неосторожные преступления в бытовой сфере могут иметь вообще другой механизм. Следовательно, необоснованно его сводить только к дефектам принятия и исполнения решения, хотя надо признать, что во многих случаях этот механизм превалирует.
В. Е. Квашис, анализируя приведенное нами определение механизма преступного поведения, обоснованно отмечает, что такая традиционная интерпретация вполне справедлива, однако она представляет лишь общую схему, наиболее приемлемую для определения механизма преступлений. В реальной действительности ее полнота может быть разной, и поэтому во многих случаях механизм неосторожного преступления действует в «сокращенном» или «свернутом» виде. Указав на то, что три первые группы механизмов преступного поведения имеют определенную общность с механизмом неосторожного преступления, который является классическим его типом механизмов, упомянутых в четвертой группе, В. Е. Квашис вступает в противоречие с самим собой, подтверждая далее вывод о дефектах принятия решения и действий как единственном механизме неосторожного преступления. Специфику неосторожных деяний он видит в таком взаимодействии объективного и субъективного, при котором неосторожное причинение вреда представляет собой противоречие между объективными требованиями ситуации, предъявляемыми к личности, и неадекватным субъективным восприятием ею данной ситуации. Это противоречие чаще всего и приводит к ошибочным решениям и виновным действиям18. Таким образом, на наш взгляд, В. Е. Квашис еще более сужает механизм неосторожного поведения, сводя его психологическую основу лишь к неправильной оценке объективной обстановки, предшествующей преступлению.
Принятие решения, как известно, — это психологический процесс, состоящий в выборе предпочтительного варианта поведения исходя из информации о ситуации и возможных последствиях. Согласно теории структуры деятельности, он состоит из трех этапов: подготовительного, основного и контрольного. Следовательно, может оказаться дефектным содержание любого из них, а не только оценка ситуации, как считает В. Е. Квашис. Кроме того, элементы механизма неосторожного преступления, совершаемого в области использования техники, нельзя сводить лишь к личности и ситуации. Сюда же относятся и сами технические системы, а также информационное обеспечение их функционирования.
В определении механизма преступного поведения встречаются ошибки и другого рода, обусловленные переносом проблем моделирования на криминологию, желанием построить схему человеческого поведения, «определить закодированную в мозгу модель потребного будущего». Так, по мнению Б. В. Волженкина, один и тот же человек, дважды попав в одинаковую ситуацию, всегда поступает одинаково19. Применительно к криминологии это означает: при определенных детерминантах совершение преступления так же необходимо, как необходимо всякое следствие, порожденное определенной причиной при определенных условиях. Иной подход означал бы, как считал автор, признание индетерминизма.
Позиция Б. В. Волженкина обоснованно подверглась критике. Б. С. Волков по этому поводу, в частности, писал: «В действительности не существует такой жесткой зависимости между факторами, детерминирующими и волю человека, и его поведение»20. Поэтому не только один и тот же человек в одинаковых ситуациях поступает по-разному, но и разные люди в идентичных ситуациях действуют одинаково. Н. А. Стручков указывал, что детерминизм человеческого поведения нельзя сводить к механическому влиянию внешних, социальных условий на поведение человека, поскольку непосредственно оно подчиняется воле конкретного индивида21.
Детерминированность человеческого поведения происходит по-иному, нежели явления природы, она базируется на других основаниях22. Конкретный акт человеческой деятельности всегда обусловлен социально. Но ситуация порождает волевой акт не сама по себе, а лишь во взаимодействии с конкретной личностью. Совокупность индивидуальных свойств человека определяет содержание и направленность поступка. В этом проявляется особенность причинной обусловленности человеческого поведения. Последнее выступает не просто как результат воздействия объективных и субъективных факторов, а как сложный процесс, в котором внешние обстоятельства вначале интериоризуются, а только затем экстериоризуются.
Преступление — всегда волевой акт, но оно, по мнению А. М. Яковлева, совершается под воздействием объективных обстоятельств. Исходя из этого деяние складывается из ряда факторов, взаимодействующих между собой. Поэтому преступление — это «результат, конечный “продукт” определенного рода взаимодействия, имевшего место между личностью и окружающей средой, той средой, в которой и находят свое коренное “осязаемое” выражение факторы более общего, объективного характера»23.
К решению проблемы механизма преступления Б. С. Волков подходил с позиции свободы выбора поведения человека. В целом разделяя концепцию А. М. Яковлева, автор подчеркивал взаимодействие объективных и субъективных обстоятельств, которые выражаются в том, что внешние условия (среда) обеспечивают возможность различного поведения. Но выбор поведения при этом остается за человеком. Только личность, опираясь на свое сознание и волю, решает, как поступить. Следовательно, имеется единство объективного и субъективного, которое в каждом отдельном случае выражает сущность антиобщественного деяния. Однако «поведение человека в обществе определяется не только силой детерминистического значения отдельных обстоятельств, но и нормами морали и права. Поэтому свобода волеизъявления для лиц, совершивших преступление, означает не только сознание обусловленной конкретными обстоятельствами возможности поступать по-другому, но и общественной опасности содеянного»24.
Для изучения механизма совершения преступления предлагались и другие пути, в частности, основанные на исследовании криминологических аспектов вины. Так, Ф. Г. Гилязев считал целесообразным изучать вину по двум направлениям:
1) интраиндивидуалистскому, т. е. внутриличностному (индивид и его особенности, черты и свойства личности, ее установка);
2) интериндивидуалистскому, т. е. межличностному (с учетом этих отношений, закономерностей процесса взаимодействия людей)25.
Таким образом, в концепции Ф. Г. Гилязева речь идет о взаимодействии социальной обстановки, оказывающей направленное воздействие на формирование и поведение личности, и самой личности.
Неосторожные преступления обладают специфическими чертами, отличающими их от умышленных посягательств. В криминологическом плане это отличие заключается, в первую очередь, в присущем только деяниям, совершаемым по неосторожности, механизме причинения общественно опасного последствия.
Механизм неосторожного транспортного преступления как разновидность неосторожного преступления вообще представляет собой динамический процесс, определенное взаимодействие элементов, его составляющих. Иначе говоря, это обобщенный «образ» посягательств на безопасное функционирование транспорта. Следовательно, необходимо, во-первых, выявить слагаемые этого образа (элементы механизма), во-вторых, определить их взаимодействие, в-третьих, показать данное взаимодействие в динамике.
Транспорт, являясь полиэргатической системой, включает в себя разные подсистемы. Элементами функционирования транспорта являются: а) техническая система; б) информационное обеспечение; в) ситуация; г) управляющий субъект.
Техническая система относится к числу сложных систем со всеми их отличительными признаками. На транспорте они представляют самостоятельный элемент взаимодействия, поэтому его нельзя относить к ситуации преступления. Если при умышленном деянии орудие, используемое для достижения преступного результата, по существу не имеет своего самостоятельного значения, то при совершении преступления по неосторожности техническая система приобретает исключительно важную роль в этиологии неосторожного преступления.
На основе изучения и обобщения неблагоприятных факторов, влекущих аварийность транспорта, вырабатываются соответствующие нормы предосторожности. Их функция — поставить действия работников транспорта в определенные рамки и тем самым установить границы безопасного поведения лиц, осуществляющих управление технической системой. Иначе говоря, создаются специальные правила предосторожности, которым придается юридическая сила. Нарушение данных правил может привести к тому, что техническая система выйдет из-под контроля управляющего субъекта и причинит вред.
На основании этого П. С. Дагель делал вывод, что «правила безопасности также входят в криминогенную ситуацию неосторожного преступления в качестве противодействующих факторов, призванных нейтрализовать имеющиеся в ситуации орудия опасности»26. Такая постановка вопроса представляется безосновательной. Любые правила регламентируют деятельность кого-то или чего-то (на транспорте — работу соответствующих технических систем или оператора по их обслуживанию), поэтому было бы правильнее рассматривать их вместе с технической системой либо при анализе поведения личности. Кстати сказать, сам П. С. Дагель, когда ставил вопрос о том, почему правила безопасности не играют своей предупредительной роли, оказываются нарушенными, за ответом предлагал обращаться к личности нарушителя.
Роль транспортного средства в механизме умышленного и неосторожного преступления различна, неодинакова будет и степень «контролируемости» технической системы. При совершении преступления умышленно транспортное средство удерживается лицом в контролируемом им русле, а при преступной неосторожности — выходит из такого русла27.
В работах, посвященных проблемам борьбы с аварийностью на транспорте, информационное обеспечение, как правило, не выделяется в качестве структурной части механизма преступления, его либо относят к орудиям преступления (П. С. Дагель), либо вообще о нем умалчивают (В. В. Лукьянов, В. Е. Квашис). И то и другое решение необоснованно принижает роль информационной системы в обеспечении безопасности транспорта, деятельность которого немыслима без современной, точной и многопрофильной информации.
Информационное обеспечение является неотъемлемой частью эксплуатации транспорта, поэтому его дефекты могут обусловить его аварийность, например, в результате необнаружения сигналов, их неправильного восприятия, неверной оценки, неадекватности выводов из полученной информации. Невозможно представить эксплуатацию, допустим,
...